摘要:通(tong)過對适合安(an)裝于水平管(guǎn)道的特殊結(jie)構的水平安(ān)裝金屬管浮(fú)子流量計
三(san)維湍流流場(chǎng)的數值仿真(zhēn)及實驗研究(jiu)提出一種🧑🏾🤝🧑🏼基(ji)于計算流體(ti)力學的流量(liàng)傳感器設計(jì)方法。流場仿(pang)真所需⛱️的模(mo)型采用GAMBIT來建(jian)立,通過FUNT軟件(jian)進行仿真,仿(páng)真過程中利(lì)用受力平衡(héng)控制計算精(jing)度。數值仿真(zhēn)結果和實驗(yan)結果比較當(dang)浮子受力平(ping)衡度誤差爲(wèi)9.5%時,流量誤差(cha)爲0.944%,證實了🈲仿(páng)真結果的準(zhun)确性,同時利(lì)用流場仿真(zhen)🐅信息對流量(liang)傳感器模型(xíng)做了進--步㊙️的(de)優化。
1引言
金(jin)屬管式浮子(zǐ)流量計
是一(yi)種傳統的差(cha)壓式流量計(ji),爲了适應部(bù)分管道㊙️的特(tè)殊要🐪求,本文(wén)設計研究的(de)浮子流量計(ji)是左進♌右出(chu)☔型的❤️,其測量(liang)原理與經典(diǎn)的豎直型浮(fú)子流量💛計相(xiang)同,但它是一(yi)種可🌈以安裝(zhuang)🎯于水平管道(dao)的特殊結構(gou)的浮子流量(liang)計🏃。
一般對浮(fú)子流量計
的(de)經典研究是(shi)根據伯努利(lì)方程進行的(de),在推導浮子(zǐ)流⛱️量計🐇流量(liàng)測量公式時(shi)忽略了粘性(xìng)應力項,而♊該(gāi)項♋的作💃用實(shí)🏒際上是存在(zài)的;傳統流量(liang)計的設計要(yao)通過實驗來(lai)檢驗和修正(zhèng)設計圖.紙,這(zhè)樣不僅延長(zhǎng)了設計周期(qi)而且增加了(le)設🈲計成本。基(jī)于.上述兩點(dian)原因,在設✨計(jì)水平式安裝(zhuang)浮子流量計(ji)時爲了深🔴入(rù)了解浮子🧑🏾🤝🧑🏼流(liú)量傳感器的(de)工作機理,引(yǐn)入了計算流(liú)體力學,即CFD2]技(jì)術,對傳感器(qi)流場進行數(shù)值模拟,通過(guò)❤️對仿真及實(shi)驗結果進行(háng)分析來評價(jia)初樣設計,優(you)化流量🥰傳感(gǎn)器的結✨構參(can)數,使流量傳(chuan)感器的設計(ji)更加精确,并(bìng)提高了設計(jì)效率。
2水平安(ān)裝金屬管浮(fú)子流量計
的(de)原理
2.1檢測原(yuan)理(圖1)
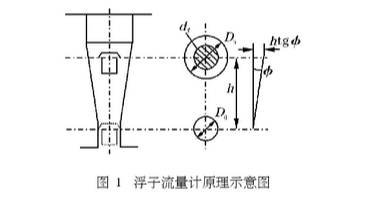
水平安裝金(jin)屬管浮子流(liú)量計的檢測(cè)原理與傳[1]統(tǒng)的金屬♈管🙇🏻浮(fú)子流量計相(xiàng)同,其體積流(liú)量公式爲

式(shì)中:Qv-體積流量(liàng);α-流量系數;h--浮(fu)子位置;φ-錐形(xing)管錐半角;Vf-浮(fu)子體🈲積🈲;Qf-浮子(zǐ)材料密度;Q一(yi)流體密度;Af-浮(fu)子垂直于流(liú)向的最大截(jie)面積;D。一浮子(zi)最大迎流面(miàn)的直徑;Dh-浮子(zi)平衡在h高度(dù)時錐形🏃🏻管的(de)直徑;df-浮子最(zuì)大直徑。
2.2模型(xíng)建立及其設(shè)計要求
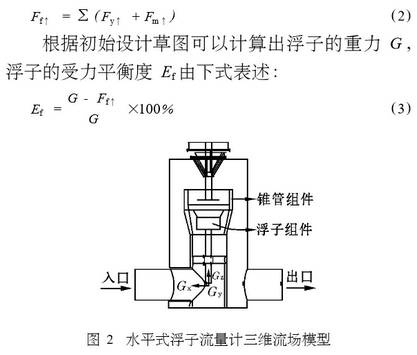
浮子(zi)流量計傳統(tǒng)的設計方法(fa)是建立在式(shì)(1)的基礎之.上(shang),在⛹🏻♀️該方程中(zhong)流量系數α是(shì)一個受很多(duo)因素影響的(de)變量。對于🚶本(ben)文🐅所研究的(de)水平式安裝(zhuang)浮子流💰量計(jì),測🔞量介質爲(wei)20℃的水🔴,設計要(yao)🚶求流量測量(liàng)範圍1~10m3/h,量程比(bi)爲10:1,行程50mm,其流(liu)量系數x的經(jing)驗值爲0.9~10。浮子(zi)位于41mm高處的(de)傳感器三維(wei)流場模💘型如(ru)圖2所示。
2.3計算(suan)精度的控制(zhi)
利用浮子組(zu)件受力平衡(héng)來控制計算(suàn)精度。在FLUNT的受(shou)力👄分析報告(gào)中會提供指(zhǐ)定壁面所受(shou)到的淨壓力(li)Fy↑和粘🔱性摩擦(cā)力Fm↑以及這兩(liǎng)個力的合力(li)Fr↑。這三個力遵(zun)循下面的公(gong)式:
這裏設(she)定當浮子受(shou)力平衡度|Ef|<10%時(shi),認爲浮子受(shòu)力達到平衡(heng),此時停止計(jì)算。
3數值仿真(zhēn)
3.1網格劃分及(jí)邊界設定
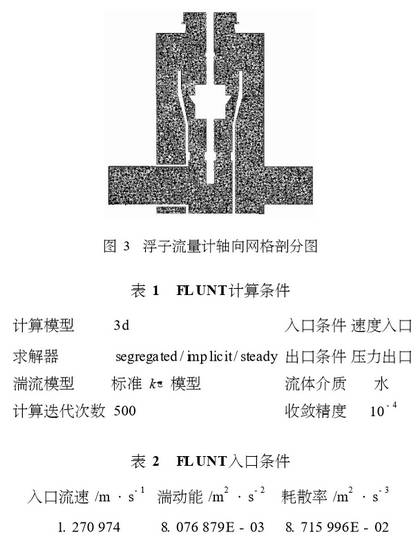
針(zhēn)對傳感器的(de)流場模型,選(xuan)擇三角形四(sì)面體網格來(lai)進行網格劃(huà)分。如圖3所示(shi)爲水平式浮(fu)子流量計浮(fu)子位于41mm高時(shi)的軸向網格(ge)剖分圖。
在進(jìn)行邊界的設(shè)定過程中設(shè)定速度入口(kǒu)、壓力出口,并(bing)❓将導杆壁面(miàn)設定爲floatwalll,浮子(zi)壁面設定爲(wèi)floatwall2,除浮子💃組件(jiàn)🔴和導向環外(wài)的空間設定(dìng)爲fluid。
3.2FLUNT計算條件(jiàn)
模型建好以(yi)後輸出.msh文件(jiàn),利用FLUNT進行仿(pang)真,FLUNT中相應計(ji)算條件如表(biao)1所示。
其中流(liú)體介質的屬(shǔ)性:密度998.2kg/m2,粘度(dù)0.001003kg/ms,定壓比熱4182J/kg.K,熱(re)導率0.6W/m.k.速度入(ru)口📧采用的是(shi)平均速度,針(zhēn)對浮子位于(yú)41mm高的🏃♂️模型計(ji)算達到⚽平衡(heng)時的入口條(tiao)件,如表2所示(shì)。
3.3仿真(zhēn)過程
水平式(shì)浮子流量計(ji)三維流場的(de)仿真過程如(rú)圖4所示。該過(guò)📞程需要解釋(shi)的幾點如下(xia)所示:
(1)因每個(gè)模型入口流(liú)速的準确值(zhi)未知,是根據(jù)經典流量公(gōng)式計🚶算的一(yi)一個假設的(de)流量,因此仿(pang)真最終結👅束(shu)的判斷依據(jù)🐇爲浮子受力(lì)平衡的程度(dù),即通過檢查(chá)仿真結果,對(dui)浮子進行受(shou)力分析,距離(li)受力平衡點(dian)誤差小于10%時(shí),認爲達到計(jì)算精度🈲,仿真(zhēn)計算結束。當(dāng)誤差大于10%,首(shou)先考🌍慮改進(jìn)該模型的網(wang)格精度,如圖(tu)4中的左側方(fāng)案1;當網格精(jing)度改進到一(yi)定程度後誤(wu)差仍大于10%,可(kě)修正入口條(tiao)件.(主要指入(rù)口流速,其餘(yu)條件可相應(yīng)計算調整),如(ru)圖4中💋的右側(ce)方案2,直到滿(mǎn)足計算精度(dù)。
(2)利用SMPLE算法計(jì)算時,每次計(ji)算叠代次數(shù)爲500次,當不足(zú)500次SMPLE算法就已(yi)經達到收斂(liǎn)精度(10“)時,程序(xu)自動結束,此(cǐ)時可💁檢查計(ji)算結果;當叠(die)代次數大于(yú)500次仍未收斂(liǎn)🏃♂️時,停止計算(suan),此時需重新(xīn)檢查網格狀(zhuàng)況和邊界設(she)定,進行網格(ge)的合理剖分(fen)和邊界的合(hé)理設定。實踐(jian)🏃🏻證明,網格布(bu)置的恰當與(yǔ)否會直接影(ying)響收斂速度(du)和收斂結果(guo),不合理的網(wǎng)格布置将導(dǎo)緻計算發散(sàn)或者結果不(bu)正确。
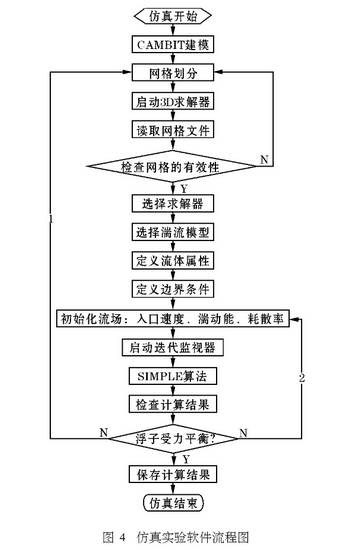
(3)叠代前(qian)首先打開監(jiān)視器,監視X.Y、Z三(san)個方向的流(liu)速以及k方程(chéng)和c方👅程的收(shōu)斂狀況,實踐(jian)證明,即使未(wèi)達到預計的(de)叠代次數,若(ruò)在監💋視器中(zhōng)已出現明顯(xian)的發🏃🏻♂️散現象(xiàng),可強行👉中止(zhǐ)本次計算。
4仿(páng)真結果及實(shí)驗結果分析(xī)
4.1壓力場分析(xi)(圖5.圖6)
比較壓(ya)力的絕對值(zhí)可以看到:浮(fu)子底部左右(you)壓力🎯不對稱(chēng),這種不對稱(chēng)現象的存在(zai)使得流量比(bi)較大時浮子(zi)會出現抖動(dong)。
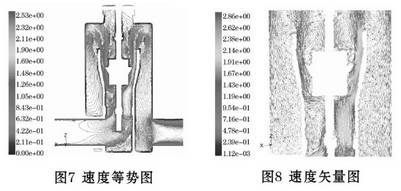
4.2速度場分析(xī)(圖7.圖8)
據圖分(fèn)析如下:
(1)據顔(yá)色分辨出環(huan)隙流通面積(jī)最小處及下(xià)遊靠近錐管(guǎn)壁的流場速(sù)度最大,前者(zhě)是流通面積(jī)減小導緻速(su)☎️度增大,後者(zhe)則是因爲流(liu)場方向的改(gǎi)變而引起的(de),特别是此處(chù)可能産生旋(xuán)渦,導緻有效(xiao)流通面積減(jian)小,流體被擠(ji)向管壁,使得(dé)此處速度增(zeng)大。
(2)流場下遊(you),外直管左下(xià)角速度較小(xiǎo),主要是.因爲(wei)流場的出口(kou)在右邊,由于(yú)出口壓力小(xiǎo),流體流動都(dōu)趨向出口。
(3)浮(fu)子的最小截(jié)面處,流場速(su)度存在較大(dà)的變化。
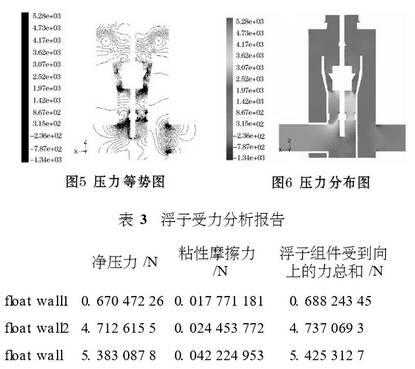
4.3浮子(zǐ)受力定量分(fèn)析
從FLUNT的受力(li)報告中可以(yǐ)得到如表3所(suo)示數據,根據(jù)設計初樣給(gei)出🈲的浮子材(cai)料及尺寸結(jié)構,可得浮子(zi)重力爲5.995146N。根據(jù)仿真結果,浮(fú)子在Z方向上(shàng)的合力爲5.4253127N。根(gen)據💁受力平‼️衡(héng)度誤💰差分析(xi)公式可得,1E,|=9.5%,小(xiǎo)于🤞設定值10%,認(rèn)爲🤟浮子受力(li)🍓達到平衡。
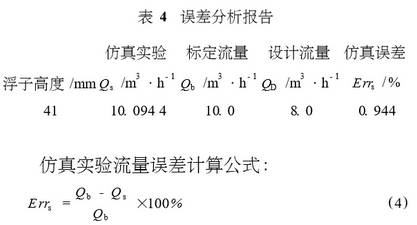
4.4物(wù)理實驗及結(jié)果分析
爲了(le)進一步驗證(zheng)傳感器流場(chang)仿真結果,需(xu)要進行物理(li)實驗✨。按照設(shè)計圖紙加工(gong)設計模型,加(jia)工完後,配上(shang)流量🍓顯示儀(yi)表,在标準裝(zhuāng)置上進行标(biao)定。标定方法(fa)利用标準表(biao)法,标準表選(xuǎn)擇渦輪流量(liang)計(精度0.5級)。結(jié)合仿💞真流量(liang)數⛹🏻♀️據、物理實(shí)驗數據與根(gen)據浮子流量(liàng)經典測🌈量公(gong)式得到的設(shè)計流量❗數據(ju)進行比較可(ke)以得到㊙️表4。
5大(da)流量下流量(liàng)傳感器結構(gòu)的優化及改(gai)進結構後的(de)仿真
由上述(shù)對壓力場的(de)分析可知浮(fu)子組件受力(lì)不平📱衡✏️,物理(li)實驗也表明(ming)在大流量下(xià)會出現流量(liang)計振動的現(xiàn)象☀️,這是由于(yu)傳感器流場(chang)出現了變化(hua)。從流場的速(su)👄度分布圖可(kě)以看出,浮子(zi)組件的右邊(bian)速度特别大(dà),其原因有前(qián)流場引起🈲的(de),也有後流場(chang)的因素,由于(yu)傳感❓器的出(chu)口在右邊,所(suǒ)以流體有向(xiang)右邊🔞流的趨(qu)勢。另❗外,由于(yú)浮子組件前(qian)直管段有個(gè)直角❤️彎,容易(yì)産生二次流(liú),對浮子組件(jian)的受力也有(you)很大🌈的♊影響(xiǎng)。所以,要減弱(ruo)振動,解決的(de)根本方法就(jiu)是改變傳感(gan)器結構參數(shu)、優化流場、使(shi)浮子左右受(shou)力差盡量減(jian)小。
根據上述(shu)分析下面對(dui)水平式流量(liang)傳感器的結(jié)構提出幾⛷️點(dian)優✂️化方案:
(1)加(jia)入整流器,以(yi)消除或減小(xiao)旋渦的産生(sheng),同時調整流(liu)速❗的分布狀(zhuang)況。
(2)将前流場(chang)的直管連接(jie)改爲彎管連(lian)接,減少旋渦(wō)的産生,順滑(huá)流體的流動(dong),使傳感器有(yǒu)比較平穩的(de)前流場📧。
(3)延長(zhang)前直管段。這(zhe)裏提及的直(zhi)管段指錐管(guan)前的垂🥰直直(zhí)管段,這☁️也是(shì)爲了使流體(ti)在通過整流(liú)器後有比較(jiao)長的🎯緩和段(duàn),使流場接近(jin)充分發展的(de)流速分布。
改(gai)進結構後的(de)仿真結果如(rú)圖9、10所示,據圖(tú)分析如下:
(1)改(gǎi)進結構後流(liú)場的壓力分(fen)布得到改善(shàn),浮.子組件受(shou)力接近🔞平🔞衡(heng),但是,由于整(zheng)流器的引入(ru),導緻了整流(liu)器前後壓差(chà)💃增大,帶來比(bi)較大的壓損(sǔn)。
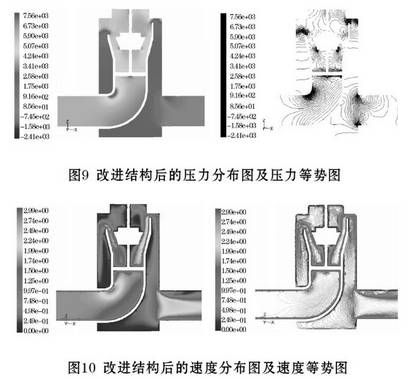
(2)改進結構後(hou)流場的速度(du)分布比較均(jun)勻,特别是使(shǐ)浮子🈲組件🙇♀️周(zhou)圍沒有太大(da)的速度差,同(tong)樣由于整流(liú)器的使用,也(ye)使🐅浮子組件(jian)🐉的前流場更(gèng)加複雜。通過(guo)物理實驗也(yě)證✊實了這幾(ji)種優化方案(an)🌈可以有效的(de)減少浮子左(zuo)右受力❓差,穩(wen)定浮💞子。
6結論(lùn)
由上述數據(ju)分析可知,對(dui)于浮子在41mm高(gao)處,時的三維(wei)湍流流場進(jìn)行仿真可得(dé)到設計要求(qiu)的流量上限(xian)值。此位置處(chù)浮子受力平(píng)衡度誤差爲(wèi)9.5%,傳感器物理(li)實驗獲得的(de)示值刻度流(liu)量與🌏通過湍(tuan)流數值模拟(ni)🆚進行流場仿(páng)真實驗獲得(dé)的仿真流量(liàng)值㊙️較爲接近(jìn),仿真流量誤(wù)差爲0.944%。本文利(li)用浮子受力(li)平衡度誤差(chà)😄法确定仿真(zhen)計算精度獲(huò)得了較爲理(li)想的效果,即(ji)仿真過程無(wu)需過分強調(diao)浮子受力平(píng)衡度誤差的(de)減小,仿真流(liú)量誤差即可(kě)得到令人滿(man)意🏃♂️的結果。
理(li)論分析和實(shí)驗研究表明(míng),這種設計方(fāng)法不僅可以(yi)進一步地理(lǐ)解流體流動(dòng)的機理和浮(fu)子流量計的(de)測量原♊理,而(er)且使流量傳(chuan)感器的設計(jì)進--步得到優(you)化,使✌️流量測(cè)量的靈敏度(dù)和💃🏻精确度得(de)到明顯的提(tí)高。此外,對流(liu)場的數值仿(páng)真🐇與實驗研(yan)究也是分🔞析(xī)、解決流量計(ji)其它問題的(de)一-種有效方(fang)法。目前基于(yú)這種方法🔴設(shè)計的水平式(shi)金屬管浮子(zi)流量✔️計已經(jing)投入市場,現(xiàn)場,反饋這種(zhǒng)流量計性能(neng)穩定,精度可(kě)🚶♀️靠。
以上内容(rong)源于網絡,如(ru)有侵權聯系(xi)即删除!