|
|
|
|
聯系方式
|
| 電(diàn)話(市場部): |
| (拓(tuò)展部): |
| 傳真: |
|
節(jiē)假日商務聯(lián)系電話:
何經(jīng)理: 劉經理: |
| 郵(yóu)編:211600 |
| 網址:/ |
| http://banyunshe.cc/ |
| [email protected] |
|
|
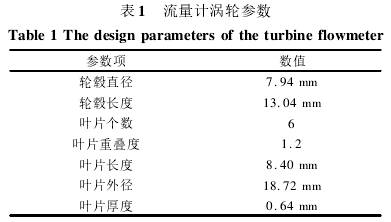
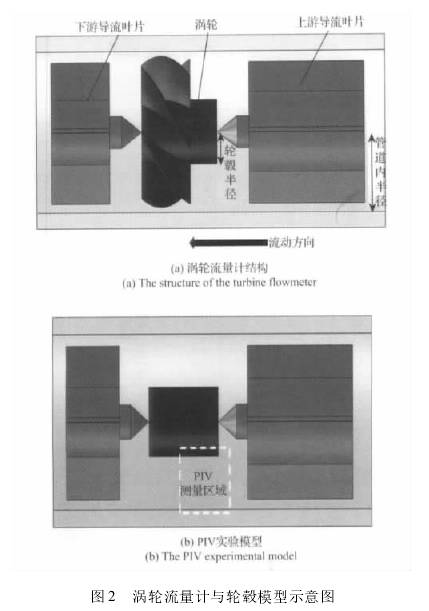
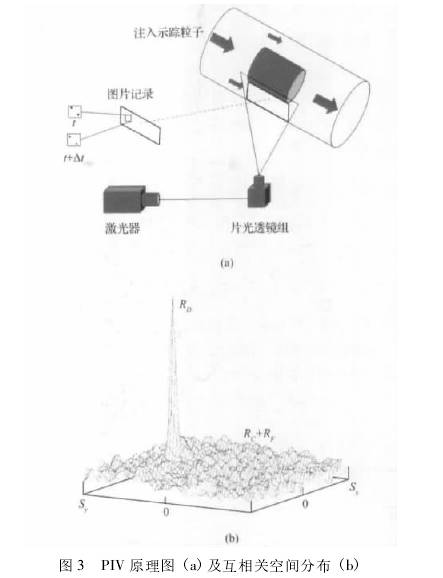
您現在的位(wei)置 > 首頁 > 行業(yè)新聞 > 基于PIV測(ce)量的渦輪流(liú)量計響應分(fen)析 |
|
|
|