摘要:研究了獲(huo)取管道振動噪(zào)聲幹擾特征的(de)方法,介紹了基(jī)于加速度傳感(gǎn)器的管道振動(dong)信号的采集.結(jié)合渦街流量信(xìn)号和管道振動(dòng)信号的頻譜分(fèn)析結果,指出了(le)管道振動信号(hào)頻率與渦街流(liu)量計
信号的主(zhu)要幹擾分量頻(pín)率直接相關.研(yán)究表明,可⭐通過(guò)獲取管道振動(dong)加速度信号特(te)征,來間接獲得(dé)渦街流量信号(hao)中主要噪聲的(de)頻率特征.基于(yú)這一研究結論(lùn),以管道振動信(xìn)号的特征信㊙️息(xi)爲參考輸人,驗(yàn)證了通過自适(shì)應濾波對渦街(jie)流量信号中振(zhèn)🌈動噪聲的濾波(bo)方法.
現今渦街(jiē)流量計的使用(yong)越來越廣泛,因(yin)其屬于流體♋振(zhèn)動型流量計,故(gù)對振動幹擾顯(xian)得非常敏感.振(zhen)💋動幹🈲擾是🔞影響(xiǎng)渦街測量的主(zhǔ)要幹擾之-“,國内(nei)外的學者和公(gong)司對渦街流量(liàng)計抗振動問題(tí)進行了大量的(de)研究⁉️21,其中以Rosemount公(gōng)司的8800A'31和F+P公司的(de)VT/VR型爲代表[4].
本研(yán)究從獲取管道(dào)振動噪聲幹擾(rǎo)特征的方法着(zhe)💜手,分析🔞得出了(le)管道振動信号(hao)頻率與渦街流(liu)量信号的💋主要(yao)幹擾分量頻率(lü)💚直接相關,研究(jiu)了一種基于加(jiā)速度傳感器的(de)管道振動信号(hào)采集和對應的(de)自适應濾🌐波方(fāng)法.
1機械管道振(zhen)動對渦街流量(liàng)計信号的影響(xiang)
表1是不同流體(tǐ)傳感器對過程(chéng)幹擾的敏感性(xìng)影響程度❤️的統(tǒng)計🤩[5].表中“++”表示高(gāo)敏感(讀數誤差(cha)10%或更高),"+”表示敏(mǐn)感(讀🐆數誤差1%),表(biǎo)示不敏感(讀數(shu)誤差小于1%)
從表(biao)1中可以得知,渦(wo)街流量測量中(zhōng)幹擾影響大的(de)📐成分爲機械管(guan)道振動幹擾和(hé)周期性的低頻(pín)脈動⭐幹擾.
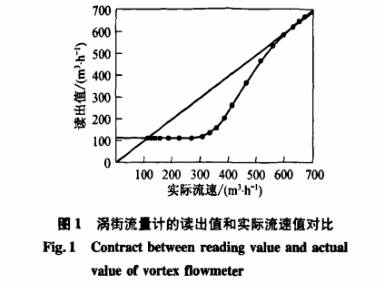
讨論(lun)了在加速度爲(wèi)1g,垂直振動頻率(lǜ)爲100Hz的振動于擾(rao)😘對⭐渦街流量計(jì)信号輸出的影(yǐng)響,如圖1所示在(zai)沒有流速的情(qíng)🤟況下,渦街傳感(gǎn)器檢測到管道(dào)振動,并錯誤判(pàn)斷100Hz是流量信号(hào),因此錯誤地顯(xian)示了120m'/h的流速.
2渦街流量信号(hào)與管道振動信(xìn)号特征聯系的(de)試驗分析
振動(dòng)幹擾是主要的(de)幹擾成分之一(yī).若要将各信号(hào)成分特征一--進(jìn)行分離,目前常(chang)用及成熟的方(fāng)法就是頻譜分(fen)析[78].在離線頻譜(pu)分析中,可以依(yi)據人腦的判斷(duan)來有效地區别(bie)振動噪聲和渦(wo)街⭐信号的頻率(lü)、能量分布的不(bú)同.然而在實際(ji)☔工程應用中,若(ruo)噪聲能量大于(yú)信⛹🏻♀️号能量,則在(zai)線的頻譜分析(xī)雖然可以💘分辨(bian)出能量的峰值(zhí),但無法有效區(qū)分能量的峰值(zhi)是信号的還是(shi)幹擾的,因此可(kě)能會🔴跟蹤了錯(cuo)誤的💔振動幹擾(rao)噪聲..
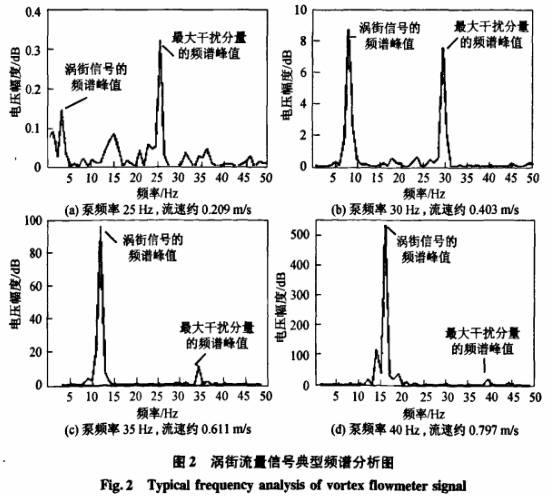
本研究對(duì)不同流速和泵(bèng)頻率組合下的(de)渦街流量信❄️号(hào)進行了數據采(cǎi)集和頻譜分析(xī),其中水泵采用(yong)格蘭富AP12.40單級潛(qián)水泵,分别調節(jiē)流速約0.209,0.403,0.611,0.797m/s.控制水(shuǐ)流速的大小,在(zài)每一開度下,再(zài)分别設置水泵(beng)工作頻率爲25,30,35,40Hz,以(yǐ)輸人🐅不同的振(zhèn)動幹擾信☁️号,如(ru)圖2所示.可見當(dang)流速小時噪📞聲(shēng)能量接近♌甚至(zhi)大于實❌際信号(hào)能量👉,在線的頻(pin)譜分析很難判(pan)斷..
考慮到(dao)管道的振動是(shi)振動幹擾直接(jiē)的物理響應,當(dāng)手觸摸管道時(shi),明顯可以覺察(chá)到管道有規律(lǜ)地振顫.基于以(yi)上🐆分析,結合振(zhèn)動測量知識,本(ben)研究認爲可以(yǐ)嘗試引人加速(su)度傳感器來采(cǎi)集管道振動🔴的(de)信号[910.
試驗中,加(jiā)速度傳感器的(de)選取較爲重要(yao).本研究加速度(dù)傳感器試驗選(xuan)擇了美國ADI公司(sī)的ADXL202,這是-種低成(chéng)本、低🥵功耗🌈、功能(néng)完普的雙軸加(jia)速度傳感器,其(qi)測量範圍爲+2g.
本(běn)試驗使用A/D數據(ju)采集卡,将ADXL202的模(mo)拟輸出信号轉(zhuǎn)換爲數😄字♍信号(hao)送人PC機進行處(chu)理,基于Labwindows/cvi測控平(ping)台的PC機能夠方(fāng)便地實現數據(ju)采集.
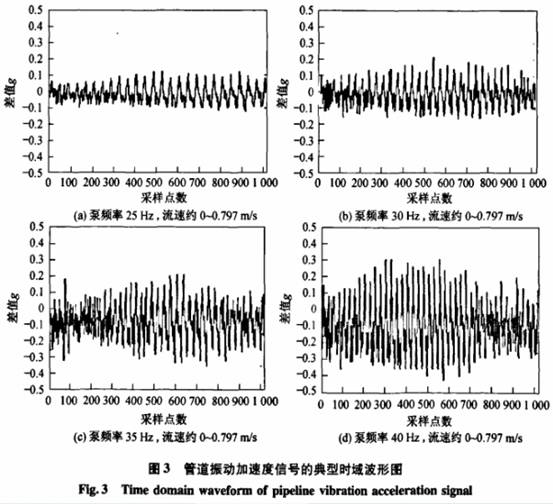
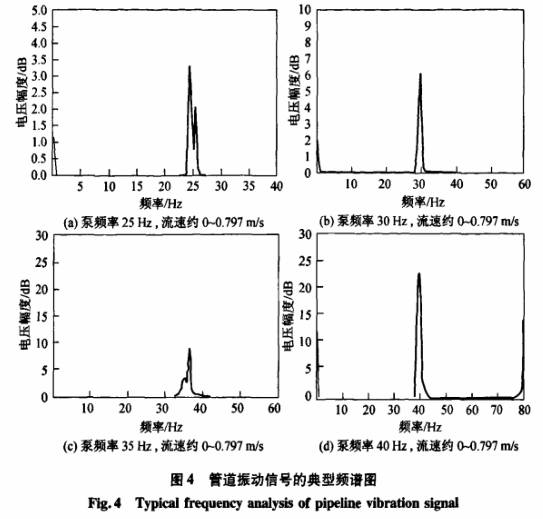
試驗工作(zuo)狀态:分别調節(jiē)流速約爲0,0.209,0.403,0.611,0.797m/s,控制(zhi)水流速的大🈲小(xiao)🏃,并在每--開度下(xià),再分别設置水(shuǐ)泵工作頻率爲(wèi)25,30,35,40Hz.加速度傳感器(qi)的模拟輸出信(xìn)号輸人到PC機的(de)A/D采集卡,采樣🏃🏻♂️頻(pín)率1000Hz.對不同流速(su)和泵頻率組合(hé)下的管道振動(dòng)信号進行數據(jù)采集和頻譜分(fen)析.圖3爲所有組(zu)合下,采樣得到(dào)的管道振動加(jia)速度信号的典(dian)型時💃域波形圖(tú).圖中橫坐标爲(wei)采樣的點數,共(gòng)1024點;縱坐标爲相(xiang)對于♻️Og标定值的(de)差值,縱坐标基(ji)準值0對應了0g的(de)标定值.圖4所示(shi)爲對應的管道(dào)振動信号的典(dian)型頻⭕譜圖.
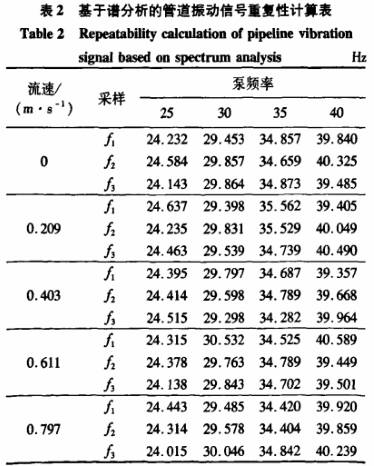
爲了(le)驗證所采集振(zhèn)動信号是否具(jù)有重複性,本研(yán)究對每種工況(kuàng)下組合的管道(dao)振動信号分别(bie)進行🔅了3次重複(fu)采樣,每次1024點,采(cai)樣頻率1000Hz.表2是各(ge)次數據分析得(de)到的頻率值.
由(you)表2的數據可以(yǐ)看出,管道振動(dong)的數據頻譜分(fèn)析得🤞到的☎️振動(dong)頻率值重複性(xìng)很高.
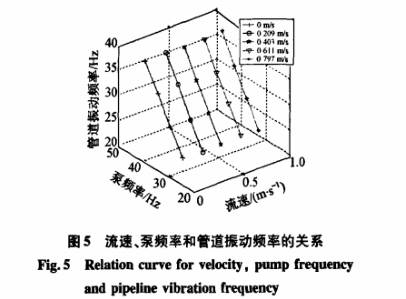
對表2的重(zhòng)複性數據計算(suan)平均值,并由平(ping)均值畫出㊙️了流(liu)速、泵頻率和管(guǎn)道振動頻率的(de)關系曲線,如圖(tu)🙇🏻5所示.分析結果(guo)表明,不論試驗(yan)裝置工況如何(he),管道振動信号(hào)的頻率和能☂️量(liang)隻與泵工作頻(pin)率相關,泵頻率(lǜ)越大,則振動信(xin)号的頻率😘和能(neng)量越大.
3對管道(dào)振動自适應濾(lǜ)波的試驗
通過(guò)以上分析可以(yi)得出結論,水泵(bèng)工作引起的管(guan)道振動🍉幹㊙️擾👄直(zhi)接耦合到了渦(wō)街輸出信号中(zhōng).試驗數據💜顯示(shì),在各種流動狀(zhuang)态下,渦街信号(hao)中叠加的千擾(rao)頻率與管🐪道加(jiā)速度振動頻率(lü)近乎于相等,且(qiě)與試驗用的水(shuǐ)泵工🐕作頻率相(xiang)近.
通過加速度(du)傳感器獲得有(you)效的管道振動(dòng)頻率後,可👉以🌈将(jiāng)之等同爲渦街(jiē)流量信号中主(zhǔ)要幹擾信号的(de)頻率.本研究提(tí)出以管道振動(dong)信号的特征輸(shu)人爲參考♻️信号(hao),采用自适應小(xiao)均方誤差(LMS)數字(zi)濾波器方法,來(lái)對渦街流量信(xin)号振動幹擾進(jìn)行處理11.LMS濾波器(qì)輸出爲
![]()
式中,W爲(wei)濾波器各系數(shù)組成的向量,X爲(wèi)監測值組成的(de)向量.
LMS算法的基(jī)本思想是利用(yong)優化方法中的(de)速下降法.根據(jù)推導,可得權系(xì)數的叠代公式(shi)爲
![]()
式中,u爲自适(shi)應系數,取值大(dà)小影響到收斂(liǎn)速度、估計值💚的(de)方差和算法的(de)穩定性.誤差e;的(de)叠代計算公式(shi)爲

用式(2)更新權(quán)系數W(t+1),随着新數(shu)據不斷輸人,不(bú)斷重複使用式(shì)(2)和式(3)進行叠代(dai),使W逐漸趨近于(yú)W。.
設采集獲得的(de)渦街流量信号(hào)爲原始信号,參(can)考輸人爲采集(jí)獲得的管道振(zhen)動加速度信号(hao),濾波器系統如(ru)圖6所示.
由上述(shù)自适應濾波器(qì)的算法,可得到(dao)系數W;的計算值(zhí)🔞爲
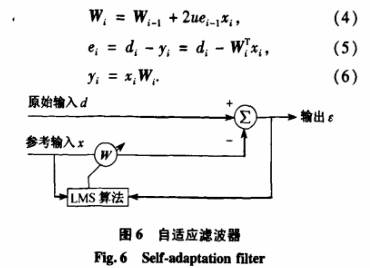
設定u值,通過(guò)式(4)~(6)的循環叠代(dai),使W;逐漸趨近于(yú)W.
如前所述,u爲控(kòng)制LMS算法收斂速(sù)度和穩定性的(de)系數,u值過大🈲可(ke)能🚩導緻發散,過(guò)小又可能使收(shou)斂速度變慢.本(běn)研究通過大量(liang)的計算,不斷修(xiu)正和比較,使其(qí)接近佳值.通過(guò)試驗計算,确定(dìng)🏃♀️u=0.1.
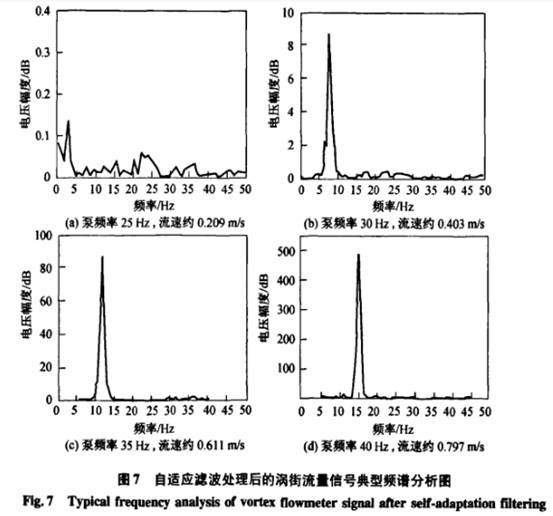
圖7爲濾波後的(de)信号頻域圖.從(cóng)圖中可以看出(chū),主要的管道振(zhen)動幹擾已經被(bei)消除,濾波後的(de)信号信噪㊙️比提(ti)高很多..
4結束語(yǔ)
本研究是在自(zì)有試驗裝置上(shang)對一部分渦街(jiē)傳感器進行試(shi)驗的.盡管不同(tóng)的管道振動有(you)其特殊性,但管(guǎn)道振動問題也(yě)有一💛-定的普遍(bian)性.本研究通過(guo)基于加速度傳(chuan)感器的管道振(zhen)動信号的采集(ji)和頻譜分析,指(zhǐ)出了管道振動(dong)信号頻率與渦(wo)💛街流量信号的(de)主要幹擾分量(liàng)頻率直接相關(guan).并采用自适應(yīng)濾波方法,驗證(zhèng)了對渦街流量(liang)✌️計振動噪聲濾(lǜ)波的有效性,爲(wei)消除振動噪聲(shēng)提供了一種有(yǒu)效的途徑值得(de)注意的是,本研(yan)究主要針對解(jie)決以泵的幹擾(rao)爲主的管道振(zhèn)動噪聲問題,對(duì)于解決其他有(yǒu)一定規律的管(guan)道振動📱噪聲也(yě)有适用性.本研(yan)究中加速度傳(chuan)感器的安裝位(wèi)置至關重要,會(huì)影響振動信号(hào)的檢測以及對(dui)渦街信号濾波(bo)處理的結果.
以(yi)上内容源于網(wang)絡,如有侵權聯(lián)系即删除!