智能渦(wo)街流量(liàng)計工作(zuò)原理與(yu)結構
1. 工(gong)作原理(lǐ)
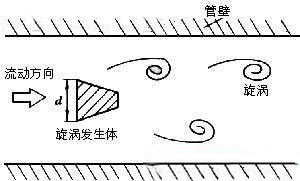
智能渦(wo)街流量(liang)計是在(zai)流體中(zhōng)設置旋(xuán)渦發生(shēng)體(阻流(liú)體),從旋(xuán)渦發生(shēng)體🍓兩側(ce)交替地(di)産生有(you)規則的(de)旋渦,這(zhè)種旋渦(wō)稱爲卡(ka)曼渦街(jiē),如圖💘1所(suo)示。旋渦(wō)列在旋(xuan)渦發生(sheng)體下遊(yóu)非對稱(chēng)地排列(liè)。設旋渦(wō)的發生(shēng)頻率爲(wèi)f,被🌍測介(jie)質來流(liú)的平均(jun1)速度爲(wèi)U,旋渦🔞發(fā)生體迎(ying)面寬度(dù)爲d,表體(tǐ)通徑爲(wei)D,根據卡(kǎ)曼渦街(jiē)原理,有(yǒu)如下關(guan)系式
f=SrU1/d=SrU/md (1)
式(shi)中U1--旋渦(wō)發生體(tǐ)兩側平(píng)均流速(su),m/s;
Sr--斯特勞(láo)哈爾數(shù);
m--旋渦發(fā)生體兩(liang)側弓形(xíng)面積與(yǔ)管道橫(héng)截面面(miàn)積之比(bǐ)
管道内(nèi)體積流(liú)量qv爲
qv=πD2U/4=πD2mdf/4Sr (2)
K=f/qv=[πD2md/4Sr]-1 (3)
式(shi)中 K--流量(liang)計的儀(yí)表系數(shu),脈沖數(shu)/m3(P/m3)。
K除與旋(xuan)渦發生(shēng)體、管道(dao)的幾何(hé)尺寸有(you)關外,還(hái)與斯特(tè)勞哈爾(er)數有關(guān)。斯特勞(láo)哈爾數(shù)爲無量(liàng)綱參數(shù),它與旋(xuan)渦發生(sheng)體形狀(zhuang)及雷諾(nuo)數有關(guan),圖2所示(shì)爲圓柱(zhu)㊙️狀旋渦(wō)發生體(ti)的斯特(tè)勞哈爾(ěr)數與管(guan)道雷諾(nuo)數的關(guan)系圖。由(you)圖可見(jiàn),在ReD=2×104~7×106範圍(wei)内,Sr可視(shì)爲常數(shu),這是儀(yí)表正常(chang)工作範(fan)圍。當測(ce)量氣體(ti)流量時(shi),VSF的流量(liang)計算式(shi)🛀爲
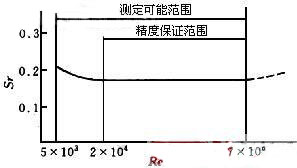
圖2 斯(sī)特勞哈(ha)爾數與(yǔ)雷諾數(shù)關系曲(qǔ)線式中(zhōng) qVn,qV--分别爲(wei)标準狀(zhuàng)✍️态下(0oC或(huò)20oC,101.325kPa)和工況(kuàng)下的體(ti)積流量(liang),m3/h;
Pn,P--分别爲(wei)标準狀(zhuang)态下和(hé)工況下(xià)的絕對(duì)壓力,Pa;
Tn,T--分(fèn)别爲标(biao)準狀态(tài)下和工(gōng)況下的(de)熱力學(xue)溫度,K;
Zn,Z--分(fen)别爲标(biao)準狀态(tài)下和工(gong)況下氣(qi)體壓縮(suo)系數。
由(you)上式可(kě)見,VSF輸出(chu)的脈沖(chòng)頻率信(xìn)号不受(shou)流體物(wù)性和組(zu)分變化(huà)的影響(xiǎng),即儀表(biǎo)系數在(zai)一定雷(léi)諾數範(fan)圍内📞僅(jin)與旋渦(wo)發生體(ti)及管道(dao)的形狀(zhuang)尺寸等(deng)有關。但(dàn)是作爲(wei)流量計(ji)在物料(liào)平衡及(ji)能源計(ji)量中需(xū)檢測質(zhì)量流量(liang),這時流(liu)量計的(de)輸出信(xin)号應同(tóng)時監測(cè)體積流(liu)量和流(liú)體密度(dù),流體物(wu)性和組(zu)分對流(liú)量計量(liang)還是有(you)直接影(ying)響的。
2. 結(jie)構
VSF由傳(chuán)感器和(he)轉換器(qì)兩部分(fèn)組成,如(ru)圖3所示(shi)。傳感器(qì)包括旋(xuan)渦發生(sheng)體(阻流(liú)體)、檢測(ce)元件、儀(yí)表表體(ti)等;轉🔞換(huan)器🏃包括(kuo)♋前置👉放(fang)大器、濾(lǜ)波整形(xíng)電路、D/A轉(zhuǎn)換電路(lu)、輸出接(jie)口電路(lu)、端子、支(zhi)架和防(fang)護罩等(deng)。近年來(lai)智能式(shì)流量計(jì)還把微(wei)處理🥰器(qì)、顯示通(tong)訊及其(qí)他功能(neng)模塊亦(yi)裝在轉(zhuǎn)換🌈器内(nèi)。
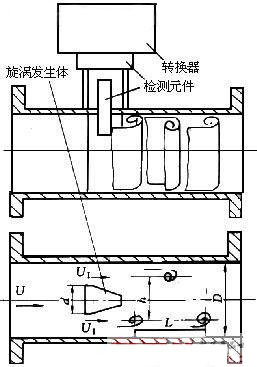
圖3 渦(wo)街流量(liàng)計
(1)旋渦(wō)發生體(ti)
旋渦發(fā)生體是(shi)檢測器(qi)的主要(yao)部件,它(ta)與儀表(biǎo)的流量(liang)特🤩性(儀(yi)表系數(shu)、線性度(du)、範圍度(du)等)和阻(zu)力特性(xing)(壓力損(sun)㊙️失)密切(qie)相關,對(duì)它的要(yào)求如下(xià)。
1) 能控制(zhi)旋渦在(zài)旋渦發(fa)生體軸(zhou)線方向(xiàng)上同步(bù)分離;
2) 在(zai)較寬的(de)雷諾數(shù)範圍内(nei),有穩定(ding)的旋渦(wō)分離點(dian),保持恒(heng)定的斯(si)特勞哈(hā)爾數;
3) 能(neng)産生強(qiáng)烈的渦(wo)街,信号(hào)的信噪(zao)比高;
4) 形(xíng)狀和結(jié)構簡單(dan),便于加(jiā)工和幾(jǐ)何參數(shu)标準化(hua),以及各(ge)種檢測(ce)元件的(de)安裝和(he)組合;
5) 材(cai)質應滿(mǎn)足流體(tǐ)性質的(de)要求,耐(nai)腐蝕,耐(nai)磨蝕,耐(nài)溫度變(bian)化🛀;
6) 固有(yǒu)頻率在(zai)渦街信(xìn)号的頻(pin)帶外。
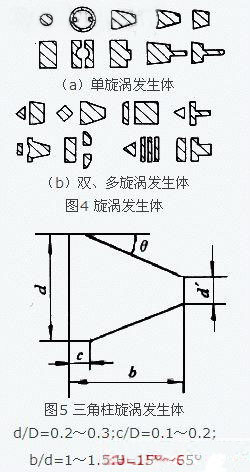
已(yi)經開發(fa)出形狀(zhuàng)繁多的(de)旋渦發(fā)生體,它(ta)可分爲(wei)單旋渦(wō)發生體(ti)和多旋(xuán)渦發生(shēng)體兩類(lei),如圖4所(suǒ)示。單旋(xuan)渦發生(shēng)體💰的基(jī)🔆本形🔞有(you)圓柱、矩(jǔ)形柱和(he)三角柱(zhù),其他形(xíng)狀皆爲(wèi)這些基(ji)本形的(de)變形。三(sān)角柱形(xing)旋渦發(fa)生體是(shi)應用最(zui)廣泛的(de)🌐一種,如(ru)圖5所示(shi)。圖中D爲(wèi)儀表口(kou)徑。爲提(ti)高渦街(jiē)強度和(hé)穩定性(xing),可采用(yòng)多旋渦(wō)發生🧑🏽🤝🧑🏻體(tǐ),不過它(tā)的應用(yong)并不普(pu)遍。
⑵智能(néng)渦街流(liú)量計檢(jian)測元件(jian)
流量計(jì)檢測旋(xuan)渦信号(hào)有5種方(fang)式。
1) 用設(she)置在旋(xuán)渦發生(sheng)體内的(de)檢測元(yuán)件直接(jiē)檢測發(fā)生🌍體兩(liǎng)側🈲差壓(yā);
2) 旋渦發(fā)生體上(shàng)開設導(dǎo)壓孔,在(zài)導壓孔(kǒng)中安裝(zhuang)檢測元(yuan)❌件⚽檢測(cè)發生體(ti)兩側差(cha)壓;
3) 檢測(cè)旋渦發(fa)生體周(zhou)圍交變(biàn)環流;
4) 檢(jian)測旋渦(wō)發生體(tǐ)背面交(jiao)變差壓(ya);
5) 檢測尾(wei)流中旋(xuan)渦列。
根(gēn)據這5種(zhong)檢測方(fāng)式,采用(yòng)不同的(de)檢測技(jì)術(熱敏(mǐn)、超聲、應(yīng)力✉️、應☂️變(biàn)、電容、電(diàn)磁、光電(diàn)、光纖等(deng))可以構(gou)成不同(tóng)類型的(de)VSF,如表1所(suo)示。 表1 旋(xuan)渦🔞發生(sheng)體和檢(jian)測方式(shi)一覽🈲表(biǎo)

⑶ 轉換器(qi)
檢測元(yuán)件把渦(wō)街信号(hao)轉換成(cheng)電信号(hào),該信号(hào)既微弱(ruò)又含有(yǒu)不同成(chéng)分的噪(zao)聲,必須(xū)進行放(fàng)大、濾波(bō)、整🔞形等(deng)處理才(cái)能得出(chu)與流量(liàng)成比例(li)的脈沖(chong)信号。
轉(zhuǎn)換器原(yuan)理框圖(tu)如圖6所(suǒ)示。
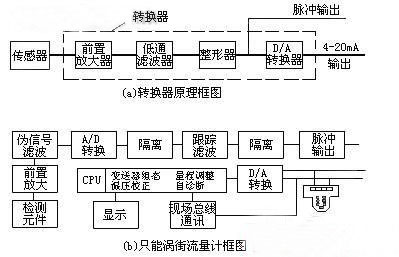
圖6 轉(zhuǎn)換器原(yuan)理框圖(tú)⑷ 儀表表(biǎo)體
儀表(biao)表體可(kě)分爲夾(jiá)持型和(hé)法蘭型(xíng),如圖7所(suǒ)示。
智能(néng)渦街流(liu)量計主(zhu)要存在(zai)的問題(tí) 主要有(you):①指示長(zhang)期不準(zhun);②始終⛷️無(wú)指示;③指(zhi)示大範(fàn)圍波動(dòng),無法讀(dú)數;④指示(shì)不回零(líng)🔴;⑤小流量(liàng)時🈲無指(zhi)示;⑧大流(liu)量時指(zhi)示還可(ke)以,小流(liú)量時指(zhǐ)示不準(zhǔn);⑦流量變(bian)化時指(zhǐ)示變化(huà)跟不上(shàng)㊙️;⑧儀表K系(xì)數無法(fǎ)确定,多(duo)處資料(liao)均不一(yī)緻。
分析(xī)及解決(jué)方法
總(zǒng)結引起(qi)這些問(wèn)題的主(zhu)要原因(yīn),主要涉(shè)及到以(yi)下方☎️面(mian):
1、選型方(fang)面的問(wèn)題。有些(xie)渦街傳(chuán)感器在(zài)口徑選(xuǎn)型上或(huo)者在設(shè)計選型(xing)之後由(you)于工藝(yì)條件變(biàn)動,使得(de)選擇大(dà)了―個規(gui)格,實際(ji)選型應(ying)選擇盡(jin)可能小(xiǎo)的口徑(jìng),以提高(gāo)測量精(jīng)♻️度,這方(fāng)面的原(yuán)因主要(yao)同問題(ti)①、③、⑥有關。比(bǐ)如,一條(tiáo)渦街管(guan)線設計(ji)上供㊙️幾(ji)個設備(bèi)使用,由(yóu)于☎️工藝(yì)部分設(shè)⁉️備有時(shí)候不使(shǐ)用,造成(cheng)目🔅前實(shí)際使用(yong)流量減(jian)小,實際(jì)🚶使用造(zào)成原設(she)計選型(xíng)口徑過(guo)大,相💚當(dang)于提高(gāo)了可測(cè)的流量(liang)下限,工(gong)藝管道(dao)小流量(liàng)時指示(shì)無法保(bao)證,流量(liang)⭐大時還(hái)可以使(shǐ)用,因🤞爲(wèi)如果要(yao)重新改(gai)造有時(shí)候難度(dù)太大.工(gōng)🧑🏾🤝🧑🏼藝條件(jiàn)的變動(dong)隻是臨(lín)時的。可(kě)結合參(can)數的重(zhong)新整定(ding)以提高(gao)指示正(zhèng)确率。
2、安(an)裝方面(mian)的問題(ti)。主要是(shì)傳感器(qì)前面的(de)直管段(duan)長📐度不(bú)夠,影響(xiǎng)測量精(jing)度,這方(fāng)面的原(yuan)因主要(yào)同問題(ti)①有關。比(bi)如:傳感(gan)器前🧑🏽🤝🧑🏻面(miàn)直管段(duàn)明顯不(bu)足,由于(yú)FIC203不用于(yu)計量✔️,僅(jin)僅用于(yú)控制,故(gu)目前的(de)精度可(ke)以使用(yòng)相當于(yú)降級使(shi)用。
3、參數(shu)整定方(fang)向的原(yuan)因。由于(yú)參數錯(cuò)誤,導緻(zhi)儀表指(zhi)☔示有誤(wù).參數錯(cuò)誤使得(de)二次儀(yi)表滿度(dù)頻率計(ji)算錯誤(wù),這方面(mian)的原因(yīn)主要同(tóng)問題①、③有(yǒu)關。滿度(du)頻率相(xiang)差不多(duō)的使得(de)指示長(zhǎng)期不準(zhǔn),實際滿(man)度頻率(lü)大幹計(ji)🙇🏻算的滿(man)度頻率(lǜ)的使得(de)指示大(da)範圍波(bō)動,無法(fa)讀數🔴,而(er)資料上(shàng)參數的(de)不一緻(zhì)性又影(yǐng)響了參(cān)數的最(zuì)終💃🏻确定(dìng),最終通(tōng)過👌重新(xin)标定結(jie)合👌相互(hù)比較确(què)定了參(can)數,解決(jue)了這一(yī)問題。
4、二(èr)次儀表(biǎo)故障。這(zhe)部分故(gu)障較多(duō),包括:一(yī)次儀表(biǎo)電路闆(pan)有斷線(xian)之處,量(liàng)程設定(dìng)有個别(bie)位顯示(shi)壞,K系數(shù)設定有(you)個别位(wèi)顯示壞(huài),使得無(wu)法确定(ding)量程設(she)定以✨及(jí)K系數💃🏻設(she)定,這部(bu)分原因(yin)主要向(xiàng)問題①、②有(you)關。通過(guo)修複相(xiàng)應的😄故(gù)障,問題(ti)得以解(jie)決。
5、四路(lù)線路連(lián)接問題(ti)。部分回(hui)路表面(miàn)上看線(xiàn)路連接(jiē)很好,仔(zai)♋細檢查(cha),有的接(jiē)頭實際(jì)已松動(dòng)造成回(huí)路中斷(duàn),有的接(jie)頭雖🛀🏻連(lian)接👅很緊(jin)但由于(yu)副線問(wen)題緊固(gù)螺釘卻(què)緊固在(zai)了線皮(pí)上😄,也使(shǐ)得回路(lu)中斷,這(zhe)部分原(yuan)💰因主要(yao)同問題(tí)②有關。
6、二(er)次儀表(biǎo)與後續(xù)儀表的(de)連接問(wèn)題。由于(yú)後續儀(yí)表的問(wen)題或者(zhě)由于後(hou)續儀表(biao)的檢修(xiū),使得二(er)次儀表(biao)的mA輸出(chū)回♍路中(zhong)斷,對于(yu)這😄類型(xing)的二次(ci)儀表來(lái)說,這部(bù)分原因(yin)主要📐同(tong)問題②有(yǒu)關。尤其(qí)是對于(yu)後續的(de)記💔錄儀(yi),在記錄(lù)儀長期(qi)損壞無(wú)法修複(fú)的情況(kuàng)下,一定(dìng)要注意(yi)短接二(èr)次儀表(biǎo)的輸出(chū)。
7、由于二(èr)次儀表(biao)平軸電(dian)纜故障(zhang)造成回(hui)路始終(zhōng)無指示(shì)。由于長(zhǎng)期運行(hang),再加上(shàng)受到灰(huī)塵的影(ying)響,造成(cheng)平軸電(diàn)纜故障(zhàng),通過清(qing)❌洗或🌐者(zhě)更換平(ping)軸電線(xiàn),問題得(dé)以解決(jué)。
8、對于問(wen)題⑦主要(yao)是由于(yu)二次儀(yí)表顯示(shì)表頭線(xiàn)圈固定(dìng)螺絲松(song),造成表(biǎo)頭下沉(chén),指針與(yu)表殼摩(mó)擦大,動(dòng)作不靈(líng),通過調(diào)整表頭(tóu)并重新(xīn)固定,問(wèn)題相應(yīng)解決。
9、使(shǐ)用環境(jìng)問題。尤(yóu)其是安(an)裝在地(dì)井中的(de)傳感器(qi)部分,由(you)于🈲環境(jing)濕度大(da),造成線(xiàn)路闆受(shòu)潮,這部(bu)分原因(yin)🤩主要同(tóng)問題①、②有(you)關。通過(guo)相應的(de)技改措(cuo)施,對部(bù)分環境(jing)濕度大(dà)的傳感(gan)器重新(xin)作了把(bǎ)探頭部(bu)分與轉(zhuǎn)換👄部分(fèn)分離處(chu)理,改用(yòng)了分離(lí)型傳感(gan)器,故善(shan)了工作(zuò)❤️環境,日(rì)前這🌈部(bu)分儀表(biao)運行良(liang)好。
10、由于(yu)現場調(diao)校不好(hǎo),或者由(you)于調校(xiao)之後的(de)實際情(qíng)🧑🏽🤝🧑🏻況⛹🏻♀️的💃再(zài)變動。由(you)于現場(chǎng)振動噪(zào)聲平衡(heng)調整以(yi)及靈敏(mǐn)度調整(zhěng)不好.或(huo)者由于(yú)調整之(zhi)後運行(háng)一段時(shi)間之後(hou)現場情(qing)況的再(zai)變動,造(zào)成指示(shi)問題、這(zhè)部分原(yuan)因主要(yào)同問題(ti)④、⑤有關。使(shǐ)用示波(bō)🧡器,加上(shàng)結合工(gōng)藝運行(hang)情況,重(zhòng)新調整(zheng)。
以上内(nèi)容來源(yuan)于網絡(luo),如有侵(qīn)權請聯(lian)系即删(shān)除!