1 引 言
在過程(cheng)控制和流體(tǐ)計量中,
渦街(jiē)流量計
應用(yong)相當廣泛。渦(wō)街流量計本(ben)質上是一種(zhong)流體振🧑🏽🤝🧑🏻動型(xing)流量計,因此(ci)易受測量現(xian)場的機械振(zhèn)動和不💋穩定(dìng)流場等噪聲(sheng)的幹擾,測量(liang)精度往往得(de)不到保證。如(rú)何從含有噪(zao)聲的信号中(zhōng)提取流量信(xin)息,是流量測(cè)量一直沒能(néng)很🐆好解決的(de)難題。現場的(de)噪聲各種各(gè)樣,其中,脈動(dòng)流是一種對(dui)測量精度影(yǐng)響較大的噪(zào)聲幹擾。 筆者(zhe)根據國外研(yan)究成果,從理(lǐ)論上分析了(le)脈動流幹擾(rǎo)下渦街傳感(gan)器的輸出信(xin)号,采用貝塞(sai)耳函數分解(jiě)出渦街流量(liàng)信号頻率和(hé)脈動幹擾頻(pín)率,分析流體(tǐ)脈動對渦街(jiē)流量計測量(liàng)的🍓影響;說明(ming)了在脈動流(liu)幹擾下❗出現(xiàn)的鎖定現象(xiàng);提出了提高(gāo)流量計測量(liang)精度的方法(fǎ)。
2脈動流對測(ce)量的影響
2.1渦(wo)街流量計測(cè)量原理
渦街(jiē)流量計是基(ji)于“卡門渦街(jie)”原理的流體(tǐ)振動型流量(liang)計,壓電傳感(gan)器表體内有(you)一個漩渦發(fā)生體,當流體(ti)🏃流過漩渦發(fā)生體時,在其(qi)後部兩側交(jiao)替産生兩列(liè)漩渦,一側漩(xuan)渦分離的頻(pin)率與流🔴體的(de)流速成正比(bi)。
![]()
其中,f爲漩渦(wō)分離頻率(Hz);ν爲(wèi)管道内流體(ti)的平均流速(su)✂️(m/s);St爲斯特羅😘哈(ha)常數;d爲漩渦(wo)發生體迎流(liú)面寬度(m);D爲管(guǎn)道内徑(m)。
漩渦(wō)的分離頻率(lü)在一定雷諾(nuo)數範圍内與(yǔ)通過管道的(de)流體流量成(chéng)線性關系:
因(yin)而,通過測量(liang)漩渦分離頻(pín)率,就可知道(dào)流體的流速(sù),測出通過管(guǎn)道的流體的(de)流量。
2.2脈動流(liu)條件下渦街(jiē)流量計測量(liang)結果
在流體(ti)穩定流動條(tiáo)件下,壓電傳(chuán)感器輸出的(de)電壓信号爲(wèi)正弦波。正弦(xian)波的頻率與(yǔ)流體的流速(sù)成正比,幅度(du)與流體的密(mi)度和速度的(de)平方成正比(bǐ)。
流體穩定流(liu)動狀态下,管(guan)道内流體流(liu)動平均速度(du)爲💃ν。在脈動流(liú)作用下,管道(dao)内流體的流(liu)速疊加了随(sui)🔅時間周期變(biàn)化🏃🏻♂️的脈動分(fèn)量[1]:

式中,Δν爲流(liu)體脈動時偏(piān)離穩态流速(sù)的最大幅度(dù),fp爲脈動頻🐉率(lǜ)。 因💋爲漩渦分(fen)離頻率與管(guǎn)道内流體流(liú)動速度成正(zhèng)🏃比,所以脈動(dòng)流🍉條件下的(de)漩渦分離的(de)瞬時頻率爲(wèi):

流體脈動條(tiáo)件下,渦街流(liu)量計輸出信(xin)号疊加了調(diao)頻噪聲⛹🏻♀️。從公(gōng)🌈式(2—10)可以看出(chū),輸出信号的(de)頻譜包含以(yǐ)渦街信号主(zhu)頻率fνs爲中心(xin)的較寬的頻(pín)帶,fνs左右兩則(ze)對稱分👨❤️👨布了(le)無窮多邊頻(pín)分量,邊頻分(fen)量和主頻分(fèn)量之間的間(jian)隔恰爲脈動(dòng)頻率的整數(shu)倍,它們的幅(fu)度大小由對(duì)應的各階貝(bei)塞耳函數所(suo)決定。
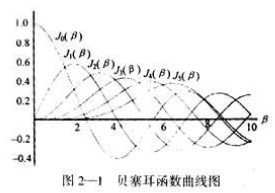
脈動系(xì)數β也是一個(gè)重要的參數(shu),它的大小變(biàn)化對輸出信(xin)号的頻譜結(jié)構有着重要(yao)的作用。由貝(bei)塞耳函數曲(qǔ)線(如圖2—1所示(shi))可知,當β≤1時,隻(zhi)有J0(β)和J1(β)有比較(jiao)大的數值,而(ér)J2(β),J3(β)等均可👣以忽(hū)略🔞,因此,輸出(chū)信号的頻譜(pǔ)實際上隻有(you)ωνs和wνs±nwp組成。當β>1時(shí),随着β的增大(dà),邊頻分✔️量數(shu)目增多。
2.3鎖定(ding)現象 脈動頻(pín)率與渦街頻(pin)率頻帶合拍(pāi)時可能引起(qi)諧振,使渦街(jiē)信号産生“鎖(suo)定(lock-in)”現象,這時(shí)渦街信号頻(pín)👨❤️👨率完全不随(suí)着流體流速(su)的變化而變(biàn)化,而是固定(dìng)于某一頻率(lü),導緻渦街流(liú)量計不能正(zheng)常工作[1]。
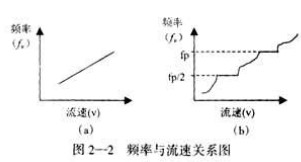
流體(tǐ)穩定流動情(qing)況下,渦街頻(pín)率與流體的(de)流速成線🔆性(xing)關📞系,如😘圖2—2a所(suǒ)示;在脈動流(liú)條件下,渦街(jiē)發行鎖🔆定現(xiàn)⚽象,渦街頻率(lǜ)與流體流速(sù)的關系出現(xian)間斷性,如圖(tú)2—2b所示。
由荷蘭(lán)TNO學院對渦街(jie)流量計在脈(mò)動流條件下(xia)的特性進行(háng)的實驗研究(jiu)結果表明,當(dang)渦街頻率和(hé)脈動頻率的(de)關👅系滿足公(gong)式(2—11)時,渦街發(fā)生鎖定現象(xiàng)。
![]()
n=1時,鎖定現象(xiang)最嚴重。鎖定(dìng)現象發生時(shi),渦街流量計(jì)測量誤🌍差最(zuì)🌍大達到60%,因此(cǐ),在使用渦街(jie)流量計進行(háng)流量測量時(shi)要避免脈動(dong)流造成的鎖(suo)定現象。
3提高(gao)脈動流條件(jian)下流量測量(liàng)精度
文獻[1]的(de)實驗結果表(biao)明,脈動流條(tiao)件下渦街流(liú)量計流量測(cè)😘量誤🏒差随着(zhe)脈動頻率和(hé)幅值的變化(hua)而不同。當渦(wo)街頻率遠大(da)于3倍脈動頻(pin)率、脈動幅度(du)達到穩态流(liu)速的30%時,渦街(jie)流量計的讀(du)數誤差低于(yu)1%,可以滿足精(jing)度要求;當渦(wō)街頻率小于(yú)3倍脈動頻率(lü)時,脈動幅度(du)僅爲穩态流(liu)速的10%,渦街流(liú)量計的讀數(shu)誤差⭐已達到(dao)60%,産生⭐很大的(de)測量誤差。如(rú)何減小誤差(chà),提高測量精(jing)度已成爲應(yīng)用中關鍵性(xìng)的👈問題。該文(wen)主要讨論渦(wō)街頻率小于(yú)3倍脈動頻率(lǜ)、脈動幅度達(da)到穩态流速(sù)的🤩50%時,渦街流(liu)量計的測量(liàng)問題,這時脈(mo)🐉動系♌數0<β≤1.5。另一(yi)方面,由于💋脈(mo)動頻率與渦(wō)街信号的頻(pín)率滿足一定(dìng)關系時産生(sheng)渦街鎖定現(xian)象,使流量計(ji)不能正常工(gong)作,所以研究(jiū)鎖定現象的(de)判定條件,準(zhǔn)确判🌍斷,及時(shi)處🤞理鎖定情(qing)況也是急待(dài)解決🏃的問題(ti)。
利用FFT計算信(xìn)号的功率譜(pǔ)[2],得到渦街信(xìn)号頻率,再通(tong)過功率譜中(zhong)⛷️相鄰邊頻之(zhi)間的間距和(hé)邊頻的幅值(zhi)來估♻️計脈動(dong)頻率和幅值(zhí),根據渦街信(xin)号頻率和脈(mo)動頻率修正(zheng)儀表系數,從(cong)而提高流量(liang)測量精度。該(gai)方法存在以(yǐ)下問題:(a)當β>1時(shi),FFT計算誤差很(hen)大,無法得到(dao)準确的渦街(jiē)信号和脈動(dong)🏃♂️信号的頻率(lǜ)和幅值。(b)認爲(wèi)⚽fp≈nfνs,n爲整數時,發(fa)🛀🏻生鎖定現象(xiang)。(c)提出利用儀(yí)表系數修正(zheng)🛀提高流量測(cè)量精度,但沒(mei)💋有給出儀表(biǎo)系數修正的(de)依據。
筆者采(cai)用自适應陷(xiàn)波的方法跟(gēn)蹤渦街信号(hao)的頻率,利🌂用(yong)信号解調的(de)原理計算脈(mò)動頻率,同時(shi)建立模闆來(lái)判斷鎖定情(qíng)況;由👄于在脈(mo)動情況下,儀(yi)表系數也發(fā)生變化,要想(xiǎng)得♍到準确的(de)流量測量值(zhí),必須根據測(cè)量的脈動頻(pín)率和渦街頻(pin)率對儀表系(xì)數進🌈行修正(zheng)。下面❓介紹具(jù)體的步驟:
(1)采(cǎi)用自适應陷(xiàn)波法測量渦(wo)街信号頻率(lü)的測量 利用(yong)👉自适應陷波(bo)的方法[3],抑制(zhi)脈動噪聲的(de)幹擾,提取渦(wo)街信号,測得(de)其頻率,并跟(gēn)蹤渦街信号(hào)的變化。自适(shì)應陷波是根(gēn)據被處理信(xìn)号的情況,調(diao)整自身參數(shu),使其幅頻特(te)性的陷波頻(pin)率收斂到渦(wo)街信号的頻(pin)率,使渦街信(xin)号頻率以外(wài)的所有噪聲(shēng)通過,由濾波(bō)器的參數🔴求(qiu)出渦街頻率(lü)。然後,将噪聲(sheng)信号💃🏻從輸入(ru)到
陷波器的(de)信号中減去(qù),得到增強信(xin)号。
(2)利用頻譜(pu)分析求增強(qiang)信号功率譜(pu),将該功率譜(pǔ)與已建立的(de)模闆作比較(jiào),判斷是否發(fā)生鎖定。在脈(mo)動流條件下(xià),渦街信号疊(dié)加了周期變(biàn)化的脈動幹(gan)擾,這時傳感(gan)器輸出調頻(pín)的信号,信号(hào)的頻譜含有(you)豐富的諧波(bo),在鎖定情況(kuàng)下,輸出信号(hao)的頻率不再(zai)含有諧波分(fen)量,這時渦街(jie)頻率保持恒(heng)定,頻率由脈(mò)動🔞頻率決定(dìng),可見,在這種(zhǒng)情況下,渦街(jie)信号是一個(ge)具有确定頻(pin)🌏率的窄帶信(xìn)号[4],所以可以(yǐ)利用窄帶信(xìn)号的特點來(lái)判定鎖定。 首(shou)先,建立窄帶(dài)信号的模闆(pǎn),模闆的建立(li)以窄帶信号(hào)爲基礎,根據(jù)公式(3—1)計算相(xiang)應點的模闆(pǎn)值[5]。
 數,n0爲模闆(pan)中心值,fs/N爲頻(pín)率分辨率;Q定(dìng)義爲中心頻(pin)率與信号幅(fu)值🙇🏻一半對應(ying)的頻帶寬度(dù)的比值,通常(chang)取🚶經驗值Q=30。設(shè)采樣1024點,變換(huàn)到頻域後,有(you)用的數據爲(wèi)512點,分6段建立(li)噪聲模闆:#1:0~13;#2:14~27;#3:28~56;#4:57~112;#5:113~225;#6:226~510。模(mó)闆中心值分(fen)别爲10、20、40、80、160、320。從#2模闆(pǎn)開始,模闆的(de)起點爲中心(xin)值除以2的平(ping)方根,模闆的(de)終點爲中心(xin)值乘以2的平(ping)方根。
數,n0爲模闆(pan)中心值,fs/N爲頻(pín)率分辨率;Q定(dìng)義爲中心頻(pin)率與信号幅(fu)值🙇🏻一半對應(ying)的頻帶寬度(dù)的比值,通常(chang)取🚶經驗值Q=30。設(shè)采樣1024點,變換(huàn)到頻域後,有(you)用的數據爲(wèi)512點,分6段建立(li)噪聲模闆:#1:0~13;#2:14~27;#3:28~56;#4:57~112;#5:113~225;#6:226~510。模(mó)闆中心值分(fen)别爲10、20、40、80、160、320。從#2模闆(pǎn)開始,模闆的(de)起點爲中心(xin)值除以2的平(ping)方根,模闆的(de)終點爲中心(xin)值乘以2的平(ping)方根。
然後,求(qiú)增強信号的(de)功率譜,将得(de)到的功率譜(pu)與模闆作比(bi)較,判斷是否(fǒu)發生鎖定。将(jiāng)頻譜分析得(de)到的頻率⁉️點(diǎn)對應值與相(xiang)應的模闆作(zuo)比較,比較範(fan)圍在頻率點(dian)左右一個單(dān)位間隔内👌,用(yong)斜率法進行(hang)直接比較。計(jì)算🈲頻率點及(ji)相鄰點的幅(fu)值,得到斜率(lǜ)C0,然後求出标(biāo)準模🐆闆中心(xin)及相鄰點之(zhi)間的斜率C1,如(rú)果C0≈C1,說明功率(lü)譜爲确定頻(pín)率的頻譜,這(zhè)時渦街發生(sheng)鎖定。
(3)利用調(diao)頻信号的解(jie)調原理,求出(chu)脈動頻率。
(4)根(gēn)據渦街頻率(lǜ)和脈動頻率(lü),得到修正的(de)儀表系數🔴,将(jiang)渦街頻率與(yǔ)儀表系數相(xiang)乘,計算出流(liú)量。儀表系數(shù)利用實驗确(què)🈚定的關系式(shi)得到。
流體穩(wěn)定流動時,在(zai)不同流量條(tiao)件下,得到儀(yí)表系數K與渦(wō)街🐇信号頻率(lǜ)fνs之間的關系(xì):
利用已知的(de)K、脈動流的頻(pin)率fp、渦街信号(hào)頻率fνp可以得(de)到實際的儀(yi)🎯表系數K′。 例:傳(chuán)感器輸出信(xìn)号y(t)=sin(2πfνst+1.5*sin(2πfpt)),其中,fνs=100Hz,fp=70Hz。采樣(yang)頻率1024Hz,采樣點(diǎn)數❓2048點。
利用自(zì)适應陷波測(ce)出渦街信号(hào)頻率fνp=99.998Hz,解調出(chu)脈動流♻️頻📞率(lü)fp=70.112Hz。如果采用FFT方(fang)法,計算出渦(wō)街信号頻率(lü)爲fνp=30.5Hz,産🔞生極大(dà)誤差。
4結論
在(zài)脈動流情況(kuàng)下,渦街流量(liang)計将産生較(jiao)大的測量誤(wu)差。文章根據(ju)脈動流條件(jian)下傳感器輸(shu)出信号,從3方(fāng)面研究提高(gao)流量測量精(jīng)度的方法:(1)提(tí)高渦街頻率(lü)的測量精度(dù);(2)鎖定現象的(de)判斷;(3)利用渦(wo)街頻率和脈(mo)動頻率修正(zhèng)儀表系數。提(tí)出采用自适(shi)應陷波的💃方(fang)法提高渦街(jie)頻率測量精(jīng)度,仿真結果(guo)表明精度達(dá)到0.002%。利用解調(diao)方法求解脈(mò)動頻率,精度(du)優于✏️0.2%。