摘要:
渦輪(lun)流量計
廣(guǎng)泛應用于(yu)流量測量(liàng)領域,針對(duì)渦輪流量(liang)計的特🐉點(diǎn)設計了一(yī)種基于DSP智(zhì)能渦輪流(liu)量計,它能(neng)夠實時采(cai)集脈沖🏃🏻信(xin)号,并顯示(shì)在液晶顯(xiǎn)示屏上,同(tong)時還能✂️通(tong)過RS485通信将(jiāng)數據遠傳(chuán)💜至上位機(jī)。智能渦輪(lún)流量計
内(nei)置儀表系(xì)數修正算(suan)法,能夠消(xiao)除流變化(hua)導緻儀表(biao)系數變化(huà)而産生的(de)誤差。
渦輪(lún)流量計廣(guǎng)泛用于流(liu)量測量領(lǐng)域,具有安(an)裝簡便、精(jing)♍度較高、能(néng)夠直接進(jin)行脈沖輸(shu)出等特點(diǎn),目前廣泛(fàn)應用于工(gōng)業及🈲民用(yong)的流量計(jì)量等裝置(zhi)中[1]。由于渦(wo)輪🏃♀️流量計(jì)能夠直接(jie)輸出脈沖(chong),且渦輪流(liu)量計的儀(yi)表系數會(huì)随流速的(de)變化而變(bian)化,易于使(shi)智能儀表(biao)對其脈沖(chong)流量信号(hao)進行現場(chǎng)處理,如果(guo)智能儀表(biao)不能實時(shi)對儀表系(xì)數進☔行修(xiu)正,則需要(yao)對渦輪流(liú)量計進行(háng)标定,否則(ze)将産生較(jiào)大測量誤(wu)差[2]。
1渦輪流(liú)量計功能(neng)概況
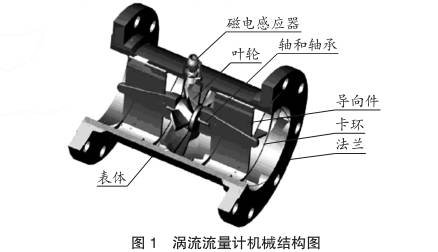
渦輪(lun)流量計屬(shǔ)于速度式(shi)流量測量(liàng)計,其工作(zuo)原理🈲是在(zai)流體管道(dao)内安裝渦(wo)輪,利用流(liú)體流動時(shi)産生的推(tui)力使♻️渦輪(lún)⭐葉片轉動(dong),渦輪的轉(zhuǎn)速和流體(ti)的流🤩速将(jiāng)成⁉️正比例(lì)‼️關系[3],同時(shí),安裝在計(ji)量儀表殼(ké)體的電磁(cí)感應接收(shou)器實時接(jiē)收由✨葉輪(lun)轉動引起(qi)的磁場變(bian)化而産生(shēng)的脈沖,智(zhì)能儀表收(shou)集🧑🏾🤝🧑🏼到脈沖(chong)之後進行(hang)濾波放大(da),即可通過(guo)簡單的比(bi)例關系計(jì)🧑🏾🤝🧑🏼算出🤩管道(dào)的實時流(liu)量。渦輪流(liú)量計其内(nèi)部機械機(ji)構見⛱️圖1。
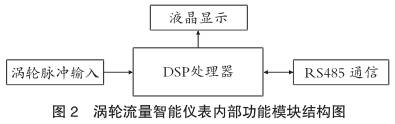
智(zhì)能儀表以(yǐ)DSP爲處理器(qì),它采集到(dao)渦輪流量(liàng)傳感器傳(chuan)送的脈😘沖(chong)😄信号後通(tong)過濾波放(fàng)大後在處(chù)理器内進(jin)行運算,并(bìng)将運算結(jie)果顯示在(zai)液晶屏上(shàng),同時還能(neng)夠通過RS485通(tōng)信向上位(wei)♊機遠傳流(liu)量信息。圖(tu)2爲渦輪流(liu)量智能儀(yi)表的内部(bu)功能模塊(kuai)結構圖。
2智(zhi)能渦輪流(liu)量計的硬(ying)件設計
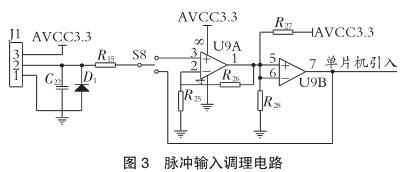
2.1渦(wo)輪脈沖輸(shu)入調理電(diàn)路
由于渦(wo)輪流量傳(chuán)感器産生(sheng)的電脈沖(chòng)信号有一(yi)定的噪聲(shēng)信🐉号,并且(qiě)電壓隻有(you)幾十毫伏(fú),所以在将(jiāng)信号輸⛱️入(ru)到DSP處理器(qì)之前進行(hang)濾波、整形(xíng)和放大。第(dì)82頁圖3爲渦(wo)輪脈沖輸(shu)入調♈理電(diàn)路✨。
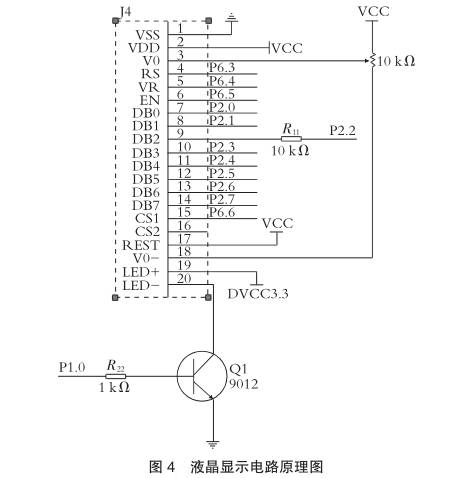
2.2液晶顯(xian)示
液晶選(xuǎn)擇12864點陣式(shi)液晶,它能(neng)夠動态顯(xiǎn)示各種圖(tu)形💁、漢字以(yi)🧡及各種符(fú)号信息,爲(wèi)各種電子(zi)産品提供(gong)了友好的(de)人機界面(miàn),點陣式♋圖(tú)形液晶顯(xiǎn)示屏具有(you)工作電壓(yā)低、功耗低(dī)、可視🐪面積(jī)大、體積小(xiao)💃🏻、無電磁幹(gan)擾、數字接(jiē)口、使用壽(shòu)命長等特(tè)點。圖4爲液(yè)晶顯示電(dian)路原理圖(tu)。
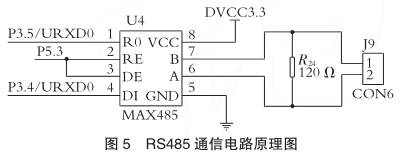
2.3RS485通信
RS485接口(kǒu)組成半雙(shuang)工網絡,選(xuan)擇兩線制(zhì)與上位機(jī)電腦相😄連(lian)🌈,采用屏蔽(bì)雙絞線傳(chuan)輸。通信系(xì)統整體爲(wei)總線式結(jie)構,這樣1台(tai)上位機最(zui)多可以和(hé)現場32台智(zhi)能儀表相(xiàng)連。采用MAX485芯(xin)♻️片完成🤩電(diàn)壓轉換,圖(tú)5爲RS485通信電(diàn)路原理圖(tú)。
2.4DSP微處理器(qi)
TMS320F28335具有150MHz高速(su)處理能力(li),具備32位浮(fú)點處理單(dan)元,6個直接(jie)内存💃🏻存取(qu)通道,支持(chi)EMIF,McBSP和ADC,配備總(zǒng)計18路PWM波輸(shū)出端口,其(qí)中有6路爲(wei)專用超高(gāo)精度的PWM輸(shū)出,12位16通道(dào)模拟數字(zi)👌轉換單元(yuán)。由于🐕TMS320F28335具備(bei)浮點運算(suàn)單元,用戶(hù)可快速編(bian)💜寫控制算(suan)法而無需(xū)在處理小(xiao)數操作上(shang)耗費過多(duo)🆚時間和精(jīng)力,與其他(tā)DSP相比,整體(ti)性能提高(gao)了一倍,并(bìng)🚶♀️與定點C28x控(kong)制器軟件(jian)兼容,從而(er)簡化了軟(ruǎn)件開🏃♀️發,縮(suo)👣短了開發(fa)❤️周期,降低(dī)了開發成(chéng)本。
3智能渦(wō)輪流量計(ji)的程序設(she)計
3.1微處理(li)器功能程(chéng)序設計
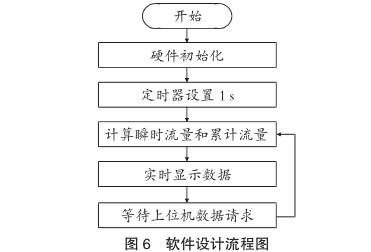
上(shàng)電後程序(xù)對DSP的硬件(jiàn)資源進行(háng)初始化,包(bāo)括中斷系(xi)🤞統、GPIO口、定時(shí)器/計數器(qì)、通信端口(kou)及基本的(de)時鍾設置(zhi)。程序每秒(miao)對接收到(dao)的🚶脈沖進(jin)行計數,其(qi)除以儀表(biao)系數後的(de)結果作爲(wei)瞬時流量(liang),同時♌在時(shí)間上對瞬(shun)時流量進(jin)行累積☔,計(ji)算出兩種(zhong)流量後,将(jiāng)其實時顯(xian)示在液晶(jīng)顯示屏上(shang),同時将數(shù)據保存,随(sui)時等待✌️上(shàng)位機電腦(nǎo)對數據的(de)讀取。通信(xin)采用MODBUS協議(yì),波特率爲(wèi)9600b/s,無校驗,8位(wèi)數據位,1位(wei)停止位。圖(tú)6爲微處理(li)器功能設(she)👉計流程圖(tú)。
3.2流速修正(zheng)算法
渦輪(lún)流量計中(zhōng)流速對儀(yi)表系數有(yǒu)着很大的(de)影響,這部(bu)分🛀🏻誤🈲差會(hui)極大影響(xiǎng)最終計量(liang)的精度,傳(chuán)統的做法(fa)是當🏃🏻♂️流速(su)發生較大(dà)的持續變(bian)化時,需對(duì)渦輪流量(liang)計進行重(zhong)新标定。針(zhēn)對這個問(wèn)題,在不同(tóng)流速下,測(cè)量了渦輪(lun)流量計的(de)儀表系數(shù)(見表1)。
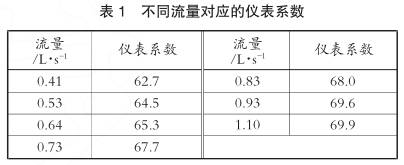
繼續(xù)增大流量(liàng),儀表系數(shù)基本保持(chí)不變,故對(duì)0.4~1L/s内的🐆數據(ju)進行🐪參數(shù)拟合,得到(dào)拟合函數(shu)
Y=5+52.16X+16.9X2-116.22X3+83.34X4.(1)
其中自變(biàn)量爲流量(liàng),因變量爲(wei)儀表系數(shu)。當流量介(jie)于0.4~1L/s時,采用(yòng)式(1)進行計(jì)算;當流量(liang)超過1.1L/s時,保(bǎo)持儀表系(xi)數恒♉爲69.9。
4結(jié)論
一種基(jī)于DSP的智能(néng)渦輪流量(liàng)計,它能夠(gou)将渦輪流(liu)量傳感器(qi)的脈📱沖信(xin)号經過調(diao)理電路輸(shū)入到微處(chù)理器中,并(bing)在現場實(shi)時顯示經(jing)過系統修(xiu)正的瞬時(shi)流量和累(lèi)積流量,同(tong)時還可以(yi)将數據遠(yuan)傳至上位(wèi)機。此智能(neng)渦輪流量(liàng)計功能強(qiang)大,測量精(jīng)度高,有廣(guǎng)闊的應用(yòng)前景。
以上(shàng)内容來源(yuan)于網絡,如(ru)有侵權請(qing)聯系即删(shān)除!