摘(zhāi)要:爲了改善(shàn)渦街流量計(jì)
的性能,提出(chu)了一種基于(yú)卡爾曼濾波(bo)的渦街信号(hao)處理方法。根(gēn)據渦街信号(hao)的特點,設計(ji)了一個線性(xing)渦街信号模(mo)型。結合模糊(hu)搜索和叠代(dài)算法,通過分(fèn)析卡爾曼濾(lǜ)波器算法的(de)原理和關鍵(jian)參數,改進卡(kǎ)爾曼濾波器(qì)算法。通過仿(páng)真模拟和實(shi)際流量實驗(yan)驗證了所提(ti)出的方法,并(bing)與其他方法(fǎ)進行了比較(jiào)。實驗結果表(biao)明,所提出的(de)方法具有自(zì)适應濾波、抗(kang)幹擾能力和(he)濾波速度的(de)優點。
0引言
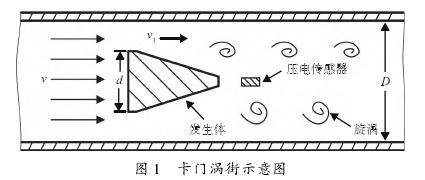
渦(wo)街流量計作(zuò)爲一種振動(dòng)型流量計,具(jù)有應用範圍(wéi)廣、測量介質(zhì)多耐高溫、耐(nai)高壓等優點(dian),具有廣闊的(de)發展前景。渦(wo)街流量計利(lì)用流體振動(dong)的原理來測(ce)量流量。當流(liu)體通過一個(gè)垂直放置的(de)非流線型旋(xuán)渦發生體時(shi),發生體兩側(ce)會産生兩排(pai)交錯排列的(de)旋渦,被稱爲(wèi)卡門渦街,如(ru)圖1所示。發生(sheng)體後方的應(yīng)力型壓電傳(chuan)感器将旋渦(wō)産生的壓力(li)差轉換爲電(diàn)荷信号。電荷(hé)信号的變化(hua)頻率與旋渦(wō)的産生頻率(lǜ)-緻。
渦街信号(hào)具有以下兩(liǎng)個特點。
1)壓電(dian)傳感器輸出(chu)的電荷信号(hào)QH滿足正弦規(gui)律,如式(1)所示(shi)
QH=γρƒ2sin(2πƒt+φa)(1)
式中:γ爲壓電(dian)傳感器的系(xì)數,ρ爲流體密(mì)度,ƒ爲渦街頻(pín)率,φa爲初始相(xiang)位。
2)在渦街流(liú)量計中,電荷(he)放大器一般(bān)用于将傳感(gan)器輸出的電(diàn)荷信号轉換(huàn)成電壓信号(hào)。電壓信号是(shì)待處理的原(yuán)始信号,和電(dian)荷信号一樣(yàng)爲正弦波形(xíng)式。當流體密(mi)度和發生體(ti)的寬度爲固(gu)定值時,渦街(jie)信号的幅值(zhí)與頻率的平(ping)方成正比,如(ru)式(2)所示
α∞ƒ2(2)
式中(zhong):α爲渦街信号(hao)的幅值。
由于(yú)渦街流量計(jì)的傳感器屬(shǔ)于振動型傳(chuán)感器,很容易(yi)受到振動幹(gàn)擾,這對渦街(jie)流量計的測(cè)量精度和測(ce)量範圍有很(hěn)大的影響。由(yóu)于渦街信号(hao)的幅值與頻(pin)率的平方成(chéng)正比,在高流(liu)速下信号的(de)信噪比大,信(xìn)号受噪聲影(ying)響小;在低流(liu)速下信号的(de)信噪比小,信(xin)号受噪聲影(yǐng)響大,增加了(le)信号檢測的(de)難度。國内外(wài)衆多學者對(dui)這一問題進(jìn)行了研究(2-3]。近(jin)年來,卡爾曼(man)濾波方法也(ye)開始被應用(yong)在渦街流量(liang)計的信号處(chu)理中。
卡爾曼(màn)濾波是科學(xue)家R.E.Kalman等在1960年提(tí)出的一種适(shi)用于離散随(suí)機非平穩系(xì)統的最優估(gu)計算法。它基(ji)于線性離散(san)系統,将最優(you)濾波理論與(yǔ)狀态空間思(si)想相結合。宋(song)開臣等[4]針對(dui)壓電式渦街(jie)流量計抗幹(gan)擾性差的缺(quē)點,提出了基(jī)于多傳感器(qì)融合的渦街(jie)信号檢測方(fāng)法。該方法通(tong)過無迹卡爾(ěr)曼濾波算法(fǎ)将壓差傳感(gǎn)器測量的鈍(dùn)體前後壓差(cha)和其下遊的(de)渦街信号頻(pín)率進行融合(hé),增強了壓電(dian)式渦街流量(liang)計的抗振能(neng)力,有效提高(gāo)了數字帶通(tong)濾波器的測(cè)量精度。Shao等[5]針(zhēn)對渦街流量(liàng)計提出了一(yi)種基于分段(duan)卡爾曼濾波(bō)的數字信号(hao)處理方法。該(gāi)方法首先分(fen)析瞬态沖擊(ji)的特性,建立(lì)數學模型,然(rán)後在流量信(xìn)号數據中找(zhao)到含有強瞬(shùn)态沖擊的數(shu)據段,并對數(shu)據段進行卡(ka)爾曼濾波,以(yǐ)降低瞬态沖(chong)擊的功率。
本(běn)文提出了一(yi)種基于渦街(jie)信号模型的(de)卡爾曼濾波(bō)的信号處理(lǐ)方法(以下簡(jian)稱“本方法")。首(shǒu)先,根據微分(fen)原理和線性(xìng)矩陣對非線(xiàn)性的渦街信(xin)号進行線性(xìng)化處理并建(jian)立模型;其次(ci),根據渦街信(xìn)号的幅頻關(guān)系,初始化渦(wō)街信号模型(xing)頻率;再次,将(jiang)濾波後的輸(shū)出頻率作爲(wei)下一個循環(huan)的初始渦街(jiē)模型頻率進(jin)行叠代和模(mo)糊搜索,直到(dao)輸出頻率與(yǔ)模型頻率的(de)誤差在渦街(jie)流量計允許(xǔ)的誤差範圍(wei)内爲止;最後(hou),通過仿真實(shi)驗和實流實(shí)驗對該方法(fǎ)進行了驗證(zheng)。
1卡爾曼濾波(bo)原理和渦街(jiē)系統模型
1.1卡(kǎ)爾曼濾波原(yuán)理
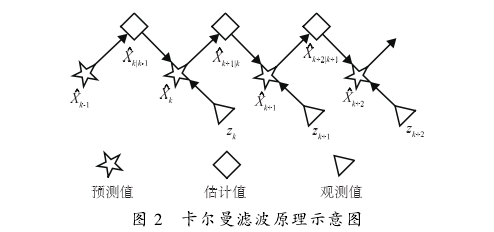
卡爾曼濾(lü)波是一種利(li)用線性系統(tǒng)狀态方程,通(tong)過系統輸人(ren)的觀測數據(jù)對系統狀态(tài)進行最優估(gū)計的算法。其(qi)基本原理如(ru)下:假設有一(yī)個離散的線(xian)性系統Xk,通過(guo)k-1時刻的最優(you)估計Xk-1得到k時(shí)刻的預測值(zhi)Xk|k-1,并用k時刻的(de)觀測值Zk修正(zhèng)預測值,從而(er)得到h時刻的(de)最優估計Xk。圖(tú)2顯示了卡爾(ěr)曼濾波原理(li)。
對于沒有控(kong)制輸人的系(xì)統,卡爾曼濾(lü)波算法的狀(zhuàng)态方程和觀(guan)測方程可用(yong)式(3).式(4)表示
Xk+1=AXk+Bwk(3)
Yk+1=HXk+1+Dʋk+1(4)
式(shì)中:Xk爲n維的狀(zhuàng)态變量在k時(shí)刻的值,wk爲p維(wei)的過程噪聲(shēng),Yk+1爲m維的觀測(ce)變量,ʋk+1爲m維的(de)觀測噪聲,A爲(wèi)變量Xk的狀态(tài)轉移矩陣,H爲(wei)系統參數矩(ju)陣,B爲過程噪(zào)聲的系數矩(jǔ)陣,D爲觀測噪(zao)聲的系數.矩(jǔ)陣。wk和ʋk+1是均值(zhi)爲0且互不相(xiang)關的高斯白(bai)噪聲。不難看(kan)出,由式(3)和式(shì)(4)構建的系統(tong)模型不包含(hán)渦街信号的(de)特征。
1.2渦街系(xi)統模型
由于(yú)渦街信号是(shì)非線性正弦(xian)波信号,不滿(mǎn)足卡爾曼濾(lǜ)波系統模型(xing)的線性要求(qiú),不能成爲卡(kǎ)爾曼濾波算(suàn)法的系統模(mo)型,需要利用(yòng)微分原理和(he)線性矩陣對(dui)渦旋信号進(jìn)行線性化處(chu)理,具體推導(dao)過程如下。
假(jiǎ)設,渦街信号(hào)的數學模型(xíng)如式(5)所示:
s(t)=asin(2πƒt)(5)
那(na)麽,其二階導(dǎo)數可以用式(shì)(6)表示:
s"(t)=-4π2aƒ2sin(2πƒt)(6)
将式(5)代(dai)人式(6),得到式(shì)(7):
s"(1)=-4π2ƒ2s(t)(7)
根據導數的(de)定義,當t>△t且△t→0時(shí),可得式(8):
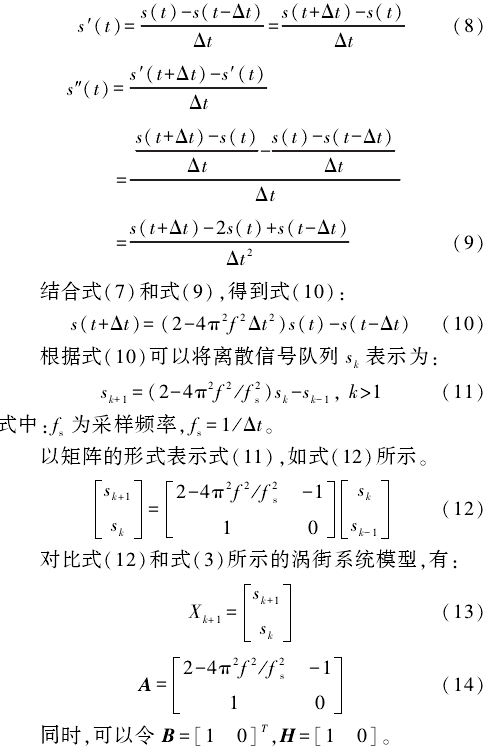
2算法(fǎ)實現
2.1算法設(she)計
卡爾曼濾(lü)波是用觀測(ce)量(實際信号(hao))對預測變量(liang)(模型信号)進(jin)行修正,濾波(bo)結果介于實(shi)際信号和模(mó)型信号之間(jiān)。同樣,濾波後(hòu)的信号頻率(lǜ)也介于實際(ji)信号頻率和(he)模型信号頻(pin)率之間。爲此(ci),設計了一種(zhong)基于渦街模(mó)型的卡爾曼(man)濾波算法,以(yi)叠代的方法(fa)搜索渦街信(xìn)号的頻率。
首(shǒu)先,根據渦街(jiē)信号的幅頻(pin)關系設置初(chu)始系統模型(xíng)頻率。按照式(shi)(2)對液體介質(zhì)管道上采集(jí)到的渦流信(xìn)号的幅值和(hé)頻率進行二(èr)次多項式拟(nǐ)合,得到在液(ye)體介質中50mm口(kou)徑渦街流量(liàng)計信号的幅(fu)值和頻率的(de)關系,如式(15)所(suo)示。
α=1.789x10-5ƒ2(15)
同理,對采(cǎi)集到的氣體(tǐ)數據進行拟(nǐ)合,可以得到(dào)氣體信号的(de)幅值與頻率(lü)的關系,如式(shì)(16)所示
α=2.622x10-8ƒ2(16)
用ƒm表示(shi)狀态模型頻(pín)率,用ƒmax,表示渦(wō)街信号的最(zui)大頻率,令ƒm=ƒmax。這(zhè)樣設置的目(mu)的是減少叠(die)代次數和計(jì)算量。于是,式(shì)(3)中的系數矩(jǔ)陣A可用式(17)表(biao)示。

當流速低(dī)時,渦街信号(hào)能量弱,噪聲(sheng)較大,因而噪(zao)聲系數D較大(dà);反之,噪聲系(xì)數D較小。由此(cǐ)可見,噪聲系(xi)數D與渦流頻(pin)率ƒ成反比。多(duō)次實驗數據(ju)分析表明,當(dang)D爲觀測信号(hao)αmax與渦街信号(hao)模型幅值α之(zhi)比時,得到了(le)理想的良好(hao)濾波效果,如(ru)式(18)所示。
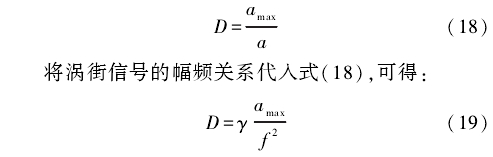
式中(zhong):ϒ爲不同介質(zhi)中幅頻關系(xì)的系數。
以50mm.口(kou)徑管道的液(yè)體介質爲例(lì),對不同流量(liang)點采集的實(shi)驗數據進行(hang)噪聲系數D和(he)信号頻率ƒ的(de)曲線拟合,拟(ni)合得到的關(guan)系式如式(20)所(suo)示。

最後,對最(zuì)優估計Xk的周(zhōu)期進行統計(jì)分析,去除組(zǔ)内雜散數據(jù)後,取平均值(zhi)的倒數作爲(wei)渦街信号的(de)頻率,以得到(dao)的頻率爲渦(wo)街信号的新(xin)系統模型頻(pín)率,對原始信(xin)号進行卡爾(ěr)曼濾波。由于(yu)原始信号中(zhong)渦街信号的(de)頻率保持不(bu)變,濾波器輸(shū)出頻率介于(yu)渦街信号頻(pin)率和模型頻(pín)率之間,濾波(bo)器輸出頻率(lü)和模型頻率(lü)在叠代中逐(zhú)漸收斂到渦(wō)旋信号頻率(lǜ)。當輸出頻率(lǜ)與模型頻率(lü)的相對誤差(cha)在預設值以(yǐ)内時,停止叠(dié)代,最終輸出(chu)渦街頻率。
2.2算(suàn)法流程
具體(tǐ)的算法步驟(zhou)整理如下。
步(bu)驟一:采集一(yi)組觀測信号(hao)序列Yk(k=1,2,3,,,N),對卡爾(ěr)曼濾波參數(shù)B、H、Q、D初始化,并拟(nǐ)合出R與ƒ的關(guan)系式。
步驟二(èr):首先,根據在(zài)叠代中不斷(duàn)變化的狀态(tai)模型頻率ƒm.對(duì)轉移矩陣A和(he)觀測噪聲協(xié)方差R進行參(cān)數更新;然後(hou),對觀測信号(hào)Yj進行狀态預(yu)測,并輸出最(zui)優估計信号(hào)序列Xk(h=1,2,3,,N)。
步驟三(san):通過脈沖翻(fan)轉整形方法(fa)對最優估計(ji)信号序列進(jin)行頻率計算(suan)。設置翻轉上(shàng)阈值Athr和翻轉(zhuan)下阈值-Ar,當信(xìn)号由低向高(gao)上升到Athr時,将(jiāng)輸出的信号(hao)電平置高。當(dang)信号由高向(xiàng)低下降到-Athr時(shí),将輸出的信(xìn)号電平置低(di),最終輸出脈(mo)沖信号序列(liè)Z(h=1,2,3,,N)。通過脈沖計(ji)數方法直接(jie)求出脈沖信(xìn)号Zk的周期序(xù)列T;(i=1,2,3,.,M),計算出周(zhou)期序列Ti,的平(píng)均值Tavg,得到濾(lü)波輸出信号(hao)的平均頻率(lǜ)ƒout=1/Tavg。
步驟四:輸出(chu)信号頻率ƒout和(he)狀态模型頻(pin)率ƒm若滿足Iƒout-ƒmI≤ƒmx1%,則(ze)跳轉到步驟(zhòu)五。若lƒout-ƒm|>ƒmx1%,且ƒout≥ƒmin,則令(lìng)fm=fe,并跳轉到步(bù)驟二;否則,應(yīng)停止搜索并(bìng)保持輸出上(shàng)一輪信号處(chù)理得到的渦(wo)街信号頻率(lü),跳轉到步驟(zhou)一。
步驟五:輸(shū)出信号幅值(zhi)Aout和拟合的渦(wō)街信号幅值(zhí)α的關系若滿(mǎn)足|Aout-αl<αx10%,則判斷爲(wèi)渦街信号頻(pin)率輸出頻率(lü)ƒout,并跳轉到步(bu)驟一;若|Aout-α|≥αX10%,則認(ren)爲是周期振(zhèn)動噪聲頻率(lǜ),跳轉到步驟(zhòu)六。
步驟六:令(lìng)ƒm=ƒmin9時,繼續向下(xia)搜索渦街信(xìn)号頻率。當ƒm≥ƒmin時(shí),跳轉到步驟(zhòu)二。若輸出頻(pin)率ƒout,仍等于噪(zào)聲頻率,則重(zhong)複步驟六;否(fǒu)則跳轉到步(bù)驟四。當ƒm<ƒmin時,應(ying)停止搜索并(bìng)輸出上一次(ci)正确的渦街(jie)信号頻率,并(bing)跳轉到步驟(zhòu)一。
3實驗驗證(zhèng)
爲驗證本方(fāng)法的有效性(xìng)、測量精度和(hé)抗幹擾性,采(cai)用仿真信号(hao)和實流信号(hao)在不同管徑(jing)、不同介質下(xia)進行實驗測(ce)試。
3.1仿真實驗(yan)
本文帶有管(guǎn)道噪聲的渦(wo)街信号模型(xíng)是基于牛津(jīn)大學獲得的(de)渦街信号功(gōng)率譜密度,Shao等(deng)在此基礎.上(shàng)加人時域波(bo)形規律和幅(fu)度衰減現象(xiang)建立的渦街(jiē)信号進行仿(pang)真模型分析(xī)。數學模型表(biao)達式如式(26)所(suo)示。
![]()
式中:α0爲渦(wo)街信号幅值(zhí);f爲渦街信号(hào)頻率;Kƒ、Kα分别爲(wèi)調頻靈敏度(du)和調幅靈敏(mǐn)度,K,爲渦街信(xin)号頻率與采(cai)樣頻率的比(bǐ)值,設Kα=1;δα(t)和δƒ(t)分别(bie)爲高斯白噪(zào)聲和渦街信(xin)号幅度和頻(pín)率的波動偏(pian)差;n(t)爲其他噪(zào)聲幹擾,包括(kuo)低頻振蕩幹(gàn)擾、工頻幹擾(rǎo)、周期振動幹(gan)擾和随機幹(gan)擾。
在上述模(mó)型中,加人具(jù)有多個單自(zi)由度阻尼彈(dan)性系統線性(xing)組合特性的(de)瞬态沖擊振(zhen)動幹擾模型(xíng),如式(27)所示。

式(shi)中:n爲系統的(de)自由度,取n=6;ne(t)爲(wei)高斯白噪聲(shēng);ξi爲阻尼系數(shù);ƒi爲振動頻率(lǜ);Φi爲初始相位(wei);αi、bi、ξi爲常數,取值(zhí)參考相關文(wen)獻。
3.1.1本方法的(de)仿真驗證
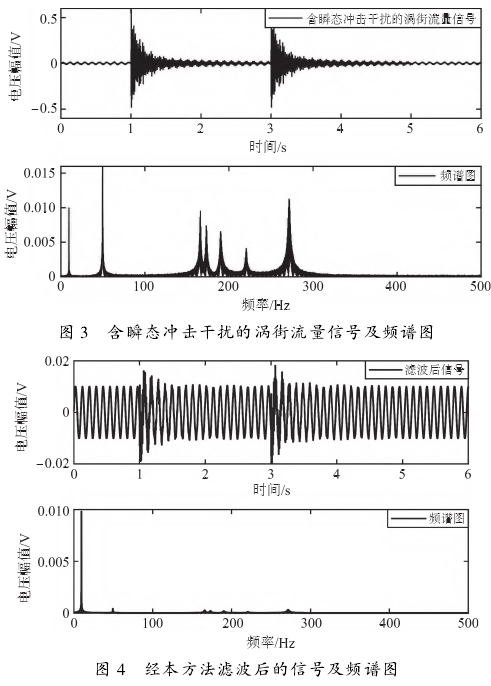
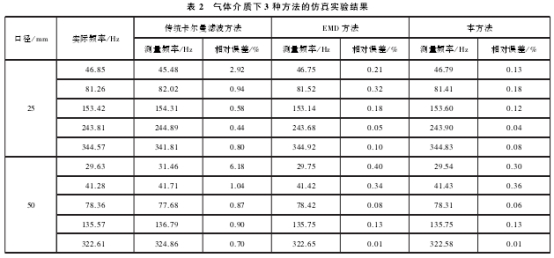
首(shou)先,驗證本方(fāng)法對瞬态沖(chòng)擊的濾波效(xiào)果。渦街信号(hào)仿真模型的(de)采樣頻率爲(wèi)10kHz、采樣時間爲(wèi)6s,加入兩次瞬(shùn)态振動幹擾(rao),管道直徑分(fen)别爲25mm;和50mm,流體(tǐ)介質爲氣體(tǐ)和液體。以管(guan)徑爲25mm、頻率爲(wèi)9.54Hz的液體介質(zhì)信号爲例,含(hán)有瞬态沖擊(ji)幹擾的渦街(jie)流量信号波(bo)形及其頻譜(pǔ)圖如圖3所示(shi)經過本方法(fa)處理後的波(bo)形及頻譜圖(tu)如圖4所示。從(cóng)圖3和圖4中可(kě)以看出,瞬态(tài)沖擊幹擾被(bei)有效濾除了(le)。
3.1.2本方法對比(bi)仿真實驗
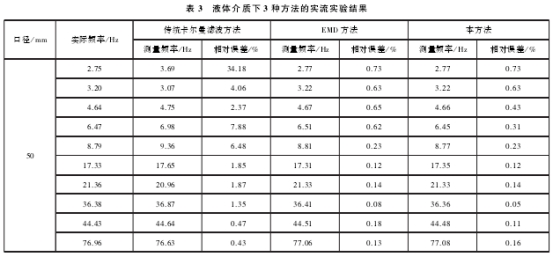
将(jiang)本方法與傳(chuán)統卡爾曼濾(lǜ)波方法、經驗(yan)模态分解方(fang)法(EMD方法)進行(háng)仿真實驗對(duì)比,在液體介(jie)質中的仿真(zhen)實驗結果列(liè)于表1,在氣體(ti)介質中的仿(pang)真實驗結果(guo)列于表2。

在表(biao)1、表2中,實際頻(pín)率是指模拟(nǐ)渦街信号的(de)頻率,相對誤(wu)差是指實測(cè)頻率與實際(jì)頻率的誤差(cha)絕對值與實(shí)際頻率的比(bǐ)值,按式(28)計算(suàn)。從中可以看(kan)出,本方法的(de)測量相對誤(wu)差小于傳統(tǒng)卡爾曼濾波(bō)方法和EMD方法(fǎ)的測量相對(dui)誤差,在低流(liú)量的情況下(xià),其測量低誤(wu)差優勢更爲(wèi)明顯。

式中:Er爲(wei)相對誤差,ƒmea爲(wèi)實測頻率,ƒa爲(wèi)實際頻率。
3.2實(shí)流實驗
本文(wen)采用由上海(hǎi)質量監督檢(jian)驗技術研究(jiū)院提供的移(yí)動式氣體流(liú)量标定裝置(zhì)進行氣體介(jie)質下的仿真(zhēn)實驗該裝置(zhi)由被檢儀表(biao)、标準儀表、風(fēng)機、工控機、穩(wen)壓箱和變頻(pín)器組成,其标(biāo)定流量範圍(wéi)爲0.5~270m3/h,測量相對(duì)擴展不确定(dìng)度不大于0.63%,穩(wěn)定性和重複(fú)性均不超過(guo)0.3%。
本文采用由(you)上海質量監(jiān)督檢驗技術(shu)研究院提供(gong)的移動式液(yè)體流量标定(ding)裝置進行液(ye)體介質下的(de)仿真實驗。該(gai)裝置由被檢(jian)儀表、标準儀(yí)表、水泵、工控(kòng)機、穩壓罐和(hé)變頻器組成(chéng)。标定裝置可(ke)提供近似穩(wěn)定的流量,通(tong)過标定時間(jian)内的累計流(liu)量可驗證裝(zhuāng)置的精度可(ke)達0.001m3/h。
實流實驗(yàn)的管道口徑(jing)爲50mm,流體介質(zhi)爲氣體和液(yè)體,采樣頻率(lǜ)爲10kHz,采樣時間(jian)爲6s。每組實驗(yàn)選取10個流量(liang)點,主要是受(shou)噪聲影響較(jiao)大的低流速(su)信号。表3和表(biao)4分别爲管徑(jìng)爲50mm液體和50mm氣(qi)體的3種方法(fa)的處理結果(guo),其中實際頻(pín)率爲标定裝(zhuang)置上标準表(biao)的信号頻率(lǜ)。

實流實驗結(jie)果表明,相比(bi)于其他兩種(zhǒng)方法,本方法(fa).具有更小的(de)誤差。
4結語
本(běn)文提出了一(yī)-種基于渦街(jie)信号模型的(de)卡爾曼濾波(bō)的渦街流量(liàng)計信号處理(li)方法。首先分(fen)析了卡爾曼(màn)濾波算法的(de)原理,利用微(wei)分原理和線(xian)性矩陣建立(li)渦街信号的(de)線性系統模(mó)型。模型的初(chū)始頻率由渦(wo)街信号的最(zui)大頻率決定(dìng),提高了算法(fǎ)的計算效率(lǜ)。而後結合模(mo)糊搜索和叠(dié)代算法對卡(ka)爾曼濾波算(suàn)法進行改進(jìn),通過叠代搜(sōu)索使濾波結(jié)果逐漸接近(jìn)渦街信号。經(jīng)驗證,循環叠(dié)代次數一般(bān)在3~10次之間,複(fú)雜度低,響應(ying)速度快。接着(zhe)爲叠代循環(huán)設置終止條(tiao)件,判斷是否(fou)找到渦街信(xin)号,并通過渦(wo)街信号的特(te)性設置邊界(jie)條件,防止叠(dié)代過程發散(san)。實現了卡爾(ěr)曼濾波器的(de)自适應濾波(bo)功能。最後通(tōng)過仿真實驗(yàn)和實流實驗(yan)計算信号頻(pín)率和相對誤(wu)差,并與傳統(tong)的卡爾曼濾(lǜ)波方法和EMD方(fang)法進行比較(jiào)。實驗結果表(biao)明,與其他兩(liang)種方法相比(bǐ),所提方法具(jù)有測量精度(du)、抗振性。渦街(jiē)信号的幅值(zhi)與頻率的關(guān)系是本文算(suan)法初始參數(shu)和輸出條件(jiàn)的設計依據(ju),其系數易受(shòu)流體溫度和(he)探頭損耗的(de)影響,從而影(ying)響算法精度(dù)。因此,本文設(shè)計的算法适(shi)用于低流體(ti)密度、低腐蝕(shi)、低溫波動的(de)場合。
本文來(lai)源于網絡,如(rú)有侵權聯系(xì)即删除!