電磁(cí)流量計(jì)
傳感器(qi)的空管(guan)狀态指(zhi)管道未(wei)被液體(ti)充滿,導(dǎo)緻電☔極(ji)部分或(huò)全部裸(luǒ)露于空(kong)氣中,該(gai)狀态下(xia)儀表示(shì)數不規(guī)則,無法(fa)正🛀🏻确顯(xian)示流量(liang)值[1]。
現階(jiē)段電磁(ci)流量計(jì)實現對(dui)空管狀(zhuang)态的檢(jian)測,主要(yào)有🤞增加(jia)電極、參(cān)數提取(qu)和附加(jiā)激勵三(san)種方法(fǎ)[2-3]。增加電(dian)極的方(fang)法需對(dui)管道進(jin)行改造(zào),在實際(jì)使用中(zhōng)可㊙️行性(xìng)不高;參(cān)數提取(qǔ)通過測(ce)量疊加(jiā)于流量(liang)信号上(shàng)的微分(fen)幹擾和(he)工頻幹(gan)擾兩種(zhong)🙇🏻信号,實(shi)現對管(guǎn)道的✌️狀(zhuàng)态判斷(duan)。由于幹(gan)擾信号(hào)幅值受(shòu)工況環(huán)境影響(xiǎng)大🌍,該方(fāng)法适用(yong)範圍較(jiao)小;附加(jia)激勵源(yuán)的方法(fǎ)又分爲(wei)🏃♂️電壓源(yuan)和電流(liu)源兩類(lei),電🈚壓源(yuán)輸出阻(zu)抗小,并(bing)聯于電(diàn)極回路(lù),使儀表(biǎo)放🚶♀️大器(qi)輸入阻(zu)抗減🏃♀️小(xiǎo),影響流(liu)量信号(hào)。電流源(yuán)輸出阻(zu)抗🐉高,對(duì)流💰量信(xin)号的影(ying)響可忽(hū)略,但電(diàn)流源輸(shū)出🔴電流(liu)值不應(yīng)過大,且(qie)電流方(fang)向應☀️可(ke)以改變(bian)以避免(mian)電極極(ji)化引起(qi)的零點(dian)漂移問(wen)題[4]。
爲了(le)實現對(dui)傳感器(qi)空管狀(zhuang)态更準(zhun)确、可靠(kao)的報警(jing)功能,一(yi)種電流(liu)源激勵(lì)形式的(de)電磁流(liú)量計空(kong)管檢測(cè)模塊。
1電(diàn)流源附(fu)加激勵(li)下傳感(gan)器電極(jí)回路模(mó)型
圖1爲(wèi)電流源(yuan)附加激(ji)勵下的(de)傳感器(qi)電極回(huí)路模型(xíng)圖👨❤️👨,E爲磁(ci)場作用(yong)下表征(zheng)流速信(xin)号的感(gan)應電動(dòng)勢,RL爲測(cè)量電極(ji)對地等(deng)效電阻(zu),Ri爲儀表(biǎo)放大器(qì)的輸入(rù)電阻,Ie爲(wei)電流源(yuán)。
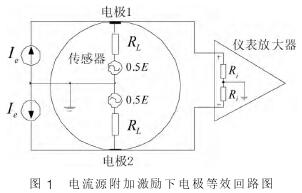
電(dian)流源模(mó)塊與傳(chuán)感器電(dian)極回路(lù)并聯,由(yóu)電流源(yuán)輸出阻(zu)抗無❄️窮(qióng)大特性(xing)可知,電(dian)流源模(mo)塊不對(dui)流量信(xin)号大小(xiao)産生影(yǐng)響。考慮(lǜ)實🤩際使(shǐ)用情況(kuàng)下,不同(tong)流體類(lei)型的🌐流(liú)體阻💞抗(kang)大小不(bu)一,對于(yu)低電導(dao)率類型(xíng)流🔱體,其(qi)流體阻(zu)抗大,爲(wei)㊙️避免采(cai)樣電勢(shì)信号📱飽(bǎo)和,電流(liú)源輸出(chu)值應根(gēn)據流體(tǐ)類型大(dà)小可調(diào),且輸出(chu)電流🚩大(dà)小在微(wei)安級。另(lìng)外,爲了(le)避免電(diàn)極長時(shí)間受同(tóng)一方向(xiàng)電流影(ying)響而産(chan)生電極(jí)極化反(fan)應,導緻(zhi)儀表零(ling)點漂移(yi)影響儀(yí)表精度(du),電流源(yuan)流向需(xu)可控。
綜(zong)上所述(shù),爲實現(xiàn)電流源(yuán)附加激(ji)勵形式(shì)的空管(guan)檢測模(mó)塊能夠(gòu)準确實(shi)現空管(guǎn)報警功(gong)能,電流(liu)源需滿(mǎn)足如下(xià)三點約(yue)束條件(jian):微弱電(diàn)流值恒(héng)流、電流(liu)方向可(ke)控、電流(liu)值可控(kòng)。
2空管檢(jiǎn)測模塊(kuai)系統框(kuàng)架
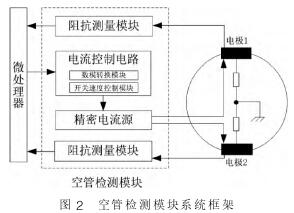
如(rú)圖2所示(shì),空管檢(jiǎn)測模塊(kuài)系統由(yóu)精密電(diàn)流源、電(diàn)流控制(zhì)電路、阻(zu)抗測量(liàng)模塊三(sān)部分組(zǔ)成。其中(zhōng),精密電(dian)流源輸(shu)出☎️恒定(dìng)電流;電(dian)流控制(zhì)電路實(shi)現對電(dian)流源輸(shu)出電流(liú)大小⭐和(hé)方向控(kòng)制;阻抗(kang)測量模(mo)塊對電(dian)極電勢(shì)進行采(cǎi)樣與電(dian)勢調整(zhěng),後送入(ru)微處理(li)器進行(hang)空管判(pàn)斷。下面(miàn)分别對(duì)三🧑🏽🤝🧑🏻部分(fen)電路設(she)計進行(hang)介紹。
2.1精(jing)密電流(liu)源電路(lù)設計
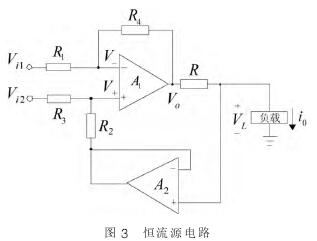
電(dian)流源并(bing)聯于傳(chuán)感器電(dian)極回路(lù),爲了不(bú)影響流(liú)量信号(hao)采集,電(dian)流源内(nèi)阻應爲(wei)高阻抗(kang)。如圖3,Vi1、Vi2爲(wèi)輸入電(diàn)壓,VL爲負(fu)載端電(diàn)壓,io爲電(dian)流源輸(shū)出,A1、A2爲運(yùn)算放大(da)器。
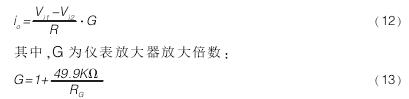
令isc爲負(fu)載短路(lu)電流,Ro爲(wèi)恒流源(yuán)等效内(nèi)阻大小(xiǎo)。由諾頓(dùn)定理,求(qiu)負載短(duǎn)路下電(dian)路的短(duan)路電流(liú)[5]:

由上述(shù)推導可(kě)知,電流(liú)源輸出(chu)阻抗無(wú)窮大,輸(shū)出電流(liu)大👈小🍓僅(jin)由輸入(rù)電壓Vi1、Vi2和(he)輸出電(dian)阻R決定(dìng),滿足空(kōng)管檢測(ce)🏃♂️模塊設(she)計要求(qiu)♍。電路的(de)不足在(zai)于,運算(suan)放大器(qì)輸入端(duan)🤞易受外(wai)部信号(hào)幹擾,故(gù)采用三(sān)運算放(fàng)大器結(jié)構替代(dài)差分放(fang)大結構(gou)。在實際(jì)設計電(diàn)⁉️路時,使(shi)用💰儀表(biao)放大器(qì)INA118替代圖(tu)3中運算(suàn)放大器(qì)A1,儀表放(fang)大器INA118優(you)⛹🏻♀️點在于(yu):
1)共模抑(yì)制比,輸(shū)入阻抗(kàng)高達1010Ω;
2)低(dī)輸入偏(piān)置電流(liu),最大值(zhi)爲10nA;
3)内部(bu)精密電(diàn)阻R1=R2=R3=R4=60kΩ;
4)較寬(kuan)的增益(yì)調節範(fan)圍,爲1~10000。
反(fǎn)饋運放(fang)A2使用低(dī)輸入偏(piān)置電流(liu)運算放(fang)大器,使(shǐ)流入運(yùn)❤️放A2的損(sǔn)失電流(liu)可忽略(luè)不計。根(gen)據電路(lu)知識,使(shǐ)❄️用儀表(biǎo)放大器(qì)⭐INA118和運放(fàng)OPA602後電路(lù)輸出電(diàn)流值:
RG爲(wèi)增益電(dian)阻,改變(biàn)RG大小即(ji)可設定(ding)電流源(yuan)輸出電(diàn)流♉值🤞。電(diàn)流🌈源輸(shu)出電流(liu)方向由(you)兩輸入(ru)端決定(ding),當Vi1-Vi2>0時,輸(shu)🏒出電流(liú)流入負(fù)載;當Vi1-Vi2<0時(shi),電流從(cong)負載流(liu)入儀表(biao)放大器(qi)。
2.2電流控(kong)制電路(lu)
電流控(kòng)制電路(lu)主要用(yòng)于設定(dìng)電流源(yuan)輸出電(diàn)流值大(da)小以及(ji)電流方(fang)向切換(huan)頻率。爲(wei)匹配不(bú)同類型(xíng)的傳感(gan)器,電路(lù)應具有(yǒu)電流值(zhí)大小調(diào)整能力(lì)。該功能(neng)使用D/A轉(zhuǎn)換芯片(pian)TLV5625實現,其(qí)特點如(rú)下:
1)雙通(tong)道、低功(gōng)耗、8位電(dian)壓輸出(chu)型數模(mo)轉換器(qì),軌對軌(guǐ)輸出
2)可(ke)采用多(duo)種通訊(xùn)接口,如(rú)SPI、TMS320。在D/A芯片(pian)後增加(jia)模拟開(kāi)關以保(bao)證🧑🏾🤝🧑🏼電流(liu)源能夠(gou)按微處(chu)理器設(she)置頻率(lǜ)進行開(kai)關控制(zhi),電流控(kòng)制電路(lu)如圖4所(suo)示。
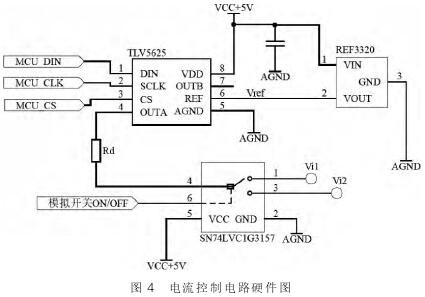
D/A轉換芯(xīn)片TLV5625采用(yong)SPI通訊方(fāng)式,MCU_DIN爲數(shù)據信号(hao),MCU_SCLK爲時鍾(zhōng)信号,MCU_CS爲(wèi)片選信(xìn)号。芯片(pian)輸出電(diàn)壓:
![]()
其中(zhong),電壓基(ji)準Vref=2.048V,由基(ji)準芯片(piàn)提供,code爲(wèi)微處理(li)器控制(zhì)的電壓(yā)值大小(xiao),範圍爲(wei)0~255。此電路(lù)輸出電(dian)壓範圍(wéi)Vout:0~4.096V。
2.3阻抗測(cè)量模塊(kuai)
最後介(jiè)紹阻抗(kàng)測量模(mó)塊電路(lù)。由電流(liú)源将電(diàn)流輸出(chū)至負載(zai)(傳感器(qi)兩電極(ji))端,并對(dui)電極端(duan)電勢信(xìn)号進行(háng)采集。該(gāi)電勢信(xìn)号采集(ji)由微處(chù)理器A/D轉(zhuan)換模塊(kuài)實現,輸(shū)🔞入電壓(yā)範圍爲(wei)0V~3.3V,因此需(xu)對電極(ji)端電勢(shì)信号做(zuo)電壓轉(zhuan)換以滿(mǎn)足微處(chù)理器A/D模(mó)塊的輸(shū)入電壓(ya)範🚶圍,電(diàn)壓轉換(huan)電路如(ru)圖5所示(shì)。
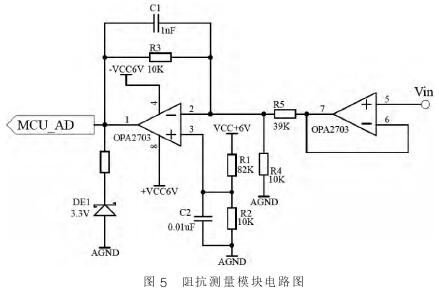
如(rú)圖5所示(shi),傳感器(qì)電極端(duan)電勢用(yong)Vin表示。在(zài)此信号(hao)被送至(zhì)微🏃處理(li)器A/D模塊(kuài)之前,對(duì)電壓值(zhi)進行調(diao)整。考慮(lü)💜傳感器(qì)空管時(shi),電極端(duān)電勢兩(liǎng)種飽和(he)狀态,Vin變(biàn)化範圍(wei)-6V~+6V。爲了避(bi)免模塊(kuai)輸出🔴端(duān)電壓值(zhi)超過微(wei)處理器(qì)最大輸(shu)入範圍(wei),令此電(dian)路滿足(zu)公式:
![]()
1)當(dāng)電流爲(wèi)流入電(diàn)極方向(xiàng),若管道(dào)飽和,Vin≈6V,VMCU_AD≈0V。
2)當(dāng)電流爲(wèi)流出電(dian)極方向(xiàng),若管道(dao)飽和,Vin≈-6V,VMCU_AD≈3V。按(àn)公式(15)進(jìn)行電壓(ya)🍓匹配,可(ke)以确保(bao)無論電(dian)流方向(xiang)正負,管(guan)道空管(guan)時信号(hào)飽和的(de)情況下(xià),輸入微(wei)處理器(qì)的電勢(shì)信号🍉不(bú)超過其(qi)阈值🏃。下(xia)面對電(dian)路阻⛹🏻♀️值(zhí)進行計(ji)算,電路(lu)總輸出(chu)電勢爲(wei):
由負載(zǎi)端電壓(ya)和負載(zǎi)電流值(zhi),可以得(dé)電極對(dui)地等🌈效(xiào)阻抗🈚值(zhí)RL,将RL與保(bao)存于微(wei)處理器(qi)中空管(guǎn)報警判(pan)斷的阈(yù)值進行(háng)比🆚較,即(jí)🌈實現對(dui)傳感器(qi)管道情(qing)況判斷(duan)。
3結束語(yu)
相比于(yu)現有方(fang)法,電磁(cí)流量計(jì)使用電(dian)流源形(xing)式的❌附(fù)加激勵(li)模✔️塊,受(shou)傳感器(qi)負載類(lei)型影響(xiǎng)小,有更(geng)廣的适(shì)🤩用範圍(wéi)和🔅更高(gao)的可🤞靠(kào)性。
以上(shang)内容來(lái)源于網(wǎng)絡,如有(yǒu)侵權請(qǐng)聯系即(jí)删除!